
В продаже, есть большое количество, дешёвых, датчиков – дальномеров, в их числе ультразвуковые и инфракрасные. Все эти устройства работают хорошо, но из – за значительного веса, не подходят для летающих роботов. Миниатюрный робот вертолет, например, может нести около 100г полезной нагрузки.
Это даёт возможность использовать, для поиска препятствий и предотвращения столкновений с ними, машинное зрение, используя веб-камеры (или другие миниатюрные, беспроводные камеры с подключением к компьютеру через USB).
А еще лучше, установить две камеры, что обеспечит роботу, стерео зрение, таким образом, благодаря информации о глубине изображения, улучшится обход препятствий. Недостатком этой идеи, является, добавление веса второй камеры.
- В этой статье описывается, как маленькая лазерная указка, вместе с одной web камерой, может обеспечить моно машинное зрение, с большим диапазоном информации.
- Этот проект основан на статье найденной здесь.
- Принцип работы
Смотрите рисунок ниже. Лазерная точка проектируется на возможное препятствие, лежащие в поле зрения камеры, расстояние до этого препятствия может быть легко вычислено. Математика здесь очень простая, обработку данных лучше всего производить в компьютерных приложениях.
Итак, вот как это работает. Лазерный луч проецируется на объект в поле зрения камеры. Этот луч должен быть идеально параллелен оптической оси камеры. Лазерная точка захватывается вместе с остальной сценой. Простой алгоритм ищет на изображении яркие пиксели.
Предполагая, что точка лазера является яркой на фоне более тёмной обстановки (я использовал обычную лазерную указку купленную в магазине за доллар), изначально положение точки в кадре не известно.
Затем нам нужно рассчитать дальность до объекта, основываясь на том, где вдоль оси Y находится лазерная точка, чем ближе она к центру изображения, тем дальше находится объект.
Как мы видим из рисунка выше, расстояние (D) может быть рассчитано по формуле:
Конечно, для решения этого уравнения, вы должны знать, h- фиксированное расстояние между лазерной указкой и камерой. Знаменатель высчитывается так:
Соединив два предыдущих уравнения, мы получим:
Итак, количество пикселей от центра плоскости изображения до лазерной точки может быть просто рассчитано с картинки. А как насчет других параметров в этом уравнении? Для их получения мы должны выполнить калибровку.
Для калибровки системы, мы будем собирать серию измерений, где нам известно, дальность до цели, а также количество пикселей центра изображения до точки лазера. Эти данные записываем в таблицу ниже:
| Данные калибровки | |
| пикселов от центра | фактический D (см) |
| 103 | 29 |
| 81 | 45 |
| 65 | 58 |
| 55 | 71 |
| 49 | 90 |
| 45 | 109 |
| 41 | 127 |
| 39 | 159 |
| 37 | 189 |
| 35 | 218 |
Используя следующее уравнение, мы можем вычислить угол наклона в зависимости от значения h, а также фактическое расстояние до каждой точки.
Теперь у нас есть расчётные значения, мы можем придумать отношения, что позволяет нам рассчитывать, дальность, зная количеством пикселей от центра изображения. Я использовал линейную зависимость.
Зная калибровочные данные, я подсчитал:
Используя калибровочные данные и данные предварительного расчёта, я подсчитал процент ошибки:
| Фактические и расчётные данные | |||
| пикселов от центра | действительный D (см) | расчётный D (см) | Ошибка(%) |
| 103 | 29,84 | 29 | 2,88 |
| 81 | 41,46 | 45 | -7,87 |
| 65 | 57,55 | 58 | -0,78 |
| 55 | 75,81 | 71 | 6,77 |
| 49 | 93,57 | 90 | 3,96 |
| 45 | 110,85 | 109 | 1,70 |
| 41 | 135,94 | 127 | 7,04 |
| 39 | 153,27 | 159 | -3,60 |
| 37 | 175,66 | 189 | -7,06 |
| 35 | 205,70 | 218 | -5,64 |
Компоненты
Для сборки дальномера требуется не так много деталей. Для соединения лазерной указки и камеры я вырезал раму – основание из картона.
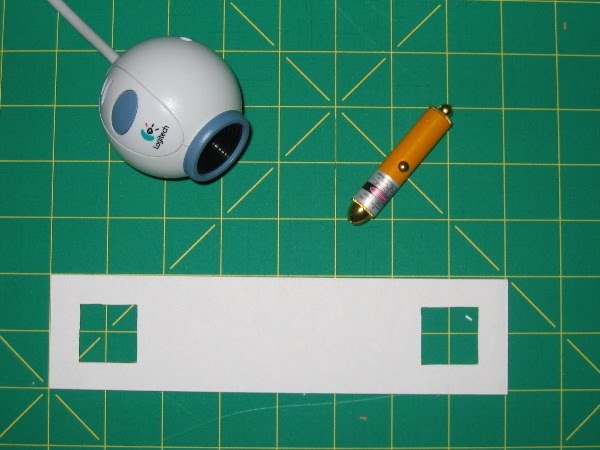
Собранный дальномер выглядит следующим образом:

Программное обеспечение
Я написал программу обработчик на двух языках: Visual C + + и Visual Basic. Вы, вероятно, подумаете, что программа на Visual Basic проще, чем на VC + + в плане кода, но во всём есть компромисс.
Код на VC + + можно собрать бесплатно (при условии, что у вас есть Visual Studio), в то время как код VB требует приобретение программных пакетов сторонних производителей (в дополнение к Visual Studio).
- Visual basic
- Написанная мною программа на Visual Basic доступна в нижней части страницы под именем vb_laser_ranger.zip
- Чтобы этот код работал, необходимо установить на вашем компьютере VideoOCX -компонент ActiveX
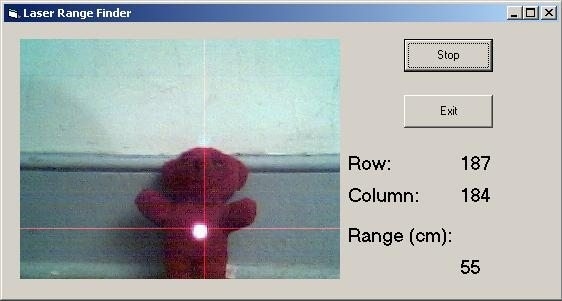
- Скриншоты из этой программы можно увидеть ниже:
Visual C++
Полный код этого проекта доступен в виде пакета с именем LaserRange.zip в нижней части страницы.
Обратите внимание, чтобы запустить исполняемый файл, вам необходимо иметь на компьютере qcsdk и qc543 драйвера.
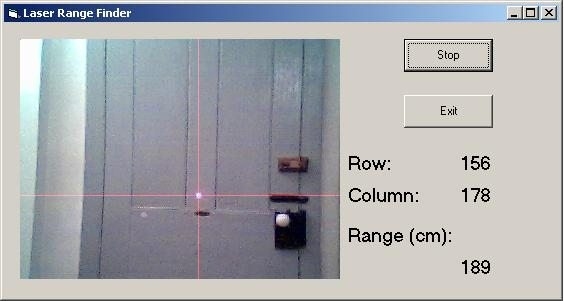
Ниже приведены два примера лазерного дальномера. Обратите внимание, что во втором примере мы видим две лазерные точки. Это «рассеянный свет» вызванный внутренними отражениями в камере. Отражённая в камере точка теряет интенсивность, и не вмешивается в алгоритм определения ярких пикселей на изображении.
- Дальнейшая работа
Одним из конкретных улучшения, которые могут быть внесены в этот дальномер, является проекция горизонтальной лазерной линии, вместо точки. Таким образом, мы сможем вычислять расстояние до цели, для каждого ряда пикселов на изображении.
В будущем
Я получал большое количество писем от людей, которые пытались дублировать этот дальномер. Пожалуйста, имейте в виду, что этот проект впервые был сделан до 2004 года (старыми методами). Если вы будите повторять эту работу, то лучше использовать для захвата и обработки изображения с камеры, библиотеку компьютерного зрения OpenCV.
Оригинал статьи
Прикрепленные файлы:
- LaserRange.zip (2006 Кб)
- tripodDlg.cpp (15 Кб)
- Коды программ.rar (31 Кб)
Самодельный фазовый лазерный дальномер

В статье я расскажу о том, как я делал лазерный дальномер и о принципе его работы. Сразу отмечу, что конструкция представляет собой макет, и ее нельзя использовать для практического применения. Делалась она только для того, чтобы убедится в том, что фазовый дальномер реально собрать самому.
Теория
Часто приходится встречать мнение, что с помощью лазера расстояние измеряют только путем прямого измерения времени «полета» лазерного импульса от лазера до отражающего объекта и обратно.
На самом деле, этот метод (его называют импульсным или времяпролетным, TOF) применяют в основном в тех случаях, когда расстояния до нужного объекта достаточно велики (>100м).
Так как скорость света очень велика, то за один импульс лазера достаточно сложно с большой точностью измерить время пролета света, и следовательно, расстояние. Свет проходит 1 метр примерно за 3.
3 нс, так что точность измерения времени должна быть наносекундная, хотя точность измерения расстояния при этом все равно будет составлять десятки сантиметров. Для измерения временных интервалов с такой точностью используют ПЛИС и специализированные микросхемы.
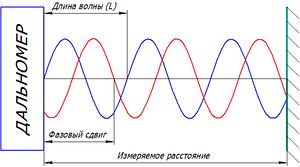
Однако существуют и другие лазерные методы изменения расстояния, одним из них является фазовый. В этом методе, в отличие от предыдущего, лазер работает постоянно, но его излучение амплитудно модулируется сигналом определенной частоты (обычно это частоты меньше 500МГц). Отмечу, что длина волны лазера при этом остается неизменной (она находится в пределах 500 — 1100 нм). Отраженное от объекта излучение принимается фотоприемником, и его фаза сравнивается с фазой опорного сигнала — от лазера. Наличие задержки при распространении волны создает сдвиг фаз, который и измеряется дальномером.
Расстояние определяется по формуле:
- Самый простой случай — использование двух частот, на низкой приблизительно определяют расстояние до объекта (но максимальное расстояние все равно ограничено), на высокой определяют расстояние с нужной точностью — при одинаковой точности измерения фазового сдвига, при использовании высокой частоты точность измерения расстояния будет заметно выше.
Где с — скорость света, f — частота модуляции лазера, фи — фазовый сдвиг.
Эта формула справедлива только в том случае, если расстояние до объекта меньше половины длины волны модулирующего сигнала, которая равна с / 2f.
Если частота модуляции равна 10МГц, то измеряемое расстояние может доходить до 15 метров, и при изменении расстояния от 0 до 15 метров разность фаз будет меняться от 0 до 360 градусов. Изменение сдвига фаз на 1 градус в таком случае соответствует перемещению объекта примерно на 4 см.
При превышении этого расстояния возникает неоднозначность — невозможно определить, сколько периодов волны укладывается в измеряемом расстоянии. Для разрешения неоднозначности частоту модуляции лазера переключают, после чего решают получившуюся систему уравнений.
Так как существуют относительно простые способы измерять фазовый сдвиг с высокой точностью, то точность измерения расстояния в таких дальномерах может доходить до 0.5 мм.
Именно фазовый принцип используется в дальномерах, требующих большой точности измерения — геодезических дальномерах, лазерных рулетках, сканирующих дальномерах, устанавливаемых на роботах.
Однако у метода есть и недостатки — мощность излучения постоянно работающего лазера заметно меньше, чем у импульсного лазера, что не позволяет использовать фазовые дальномеры для измерения больших расстояний. Кроме того, измерение фазы с нужной точностью может занимать определенное время, что ограничивает быстродействие прибора.
Наиболее важный процесс в таком дальномере — это измерение разности фаз сигналов, которая и определяет точность измерения расстояния. Существуют различные способы измерения разности фаз, как аналоговые, так и цифровые.
Аналоговые значительно проще, цифровые дают большую точность.
При этом цифровыми методами измерить разность фаз высокочастотных сигналов сложнее — временная задержка между сигналами измеряется наносекундами (эта задержка возникает также, как и в импульсном дальномере).
Для того, чтобы упростить задачу, используют гетеродинное преобразование сигналов — сигналы от фотоприемника и лазера по отдельности смешивают с сигналом близкой частоты, который формируется дополнительным генератором — гетеродином.
Частоты модулирующего сигнала и гетеродина различаются на килогерцы или единицы мегагерц. Из полученных сигналов при помощи ФНЧ выделяют сигналы разностной частоты.
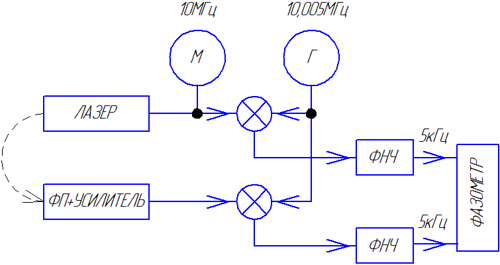
Пример структурной схемы дальномера с гетеродином. М — генератор сигнала модуляции лазера, Г — гетеродин.
Разность фаз сигналов в таком преобразовании не изменяется. После этого разность фаз полученных низкочастотных сигналов измерить цифровыми методами значительно проще — можно легко оцифровать сигналы низкоскоростным АЦП, или измерить задержку между сигналами (при понижении частоты она заметно увеличивается) при помощи счетчика. Оба метода достаточно просто реализовать на микроконтроллере.
Есть и другой способ измерения разности фаз — цифровое синхронное детектирование. Если частота модулирующего сигнала не сильно велика (меньше 15 МГц), то такой сигнал можно оцифровать высокоскоростным АЦП, синхронизированным с сигналом модуляции лазера.
Из теоремы Котельникова следует, что частота дискретизации при этом должна быть в два раза выше частоты модуляции лазера.
Однако, так как оцифровывается узкополосный сигнал (кроме частоты модуляции, других сигналов на входе АЦП нет), то можно использовать метод субдискретизации, благодаря которому частоту дискретизации АЦП можно заметно снизить — до единиц мегагерц. Понятно, что аналоговая часть дальномера при этом упрощается.
Более подробно (с всеми нужными формулами) этот метод рассматривается здесь (на английском) и здесь (на русском).
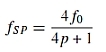
В первой статье указывается, что если частота дискретизации сигнала (fsp) связана с частотой модуляции (fo) следующим соотношением:
-
-
- Именно второй вариант фазометра, с использованием частоты модуляции 10МГц я и решил реализовать в своем макете дальномера.
где p — целое число, то процесс вычисления фазы значительно упрощается.
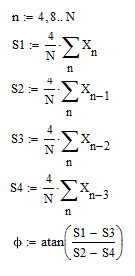
Достаточно взять N выборок сигнала X[i], после чего разность фаз можно вычислить по следующим формулам:
Отмечу, что оба вышеуказанных метода часто применяются вместе — низкочастотные сигналы подаются напрямую на АЦП, высокочастотные переносятся в область более низких частот гетеродинным мотодом, и также подаются на АЦП.
Практика
Структурная схема моего дальномера:
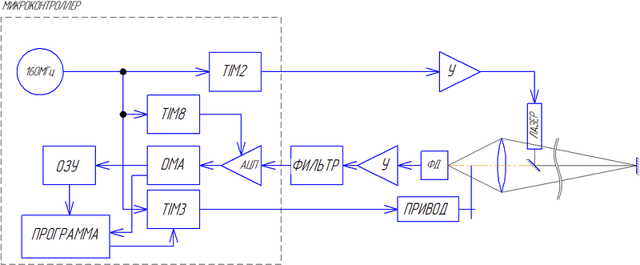
Фактически, вся конструкция состоит из 3 частей — отладочной платы с микроконтроллером, усилителя сигнала лазера с самим лазером, и фотоприемника с усилителем и фильтром.
В вышеописанной теории предполагалось, что излучение лазера модулируется синусоидальным сигналом.
Сформировать такой сигнал частотой 10Мгц с использованием контроллера непросто, поэтому в своей конструкции я подаю на лазер меандр частотой 10МГц.
После усиления сигнала с фотоприемника от полученного сигнала отсекаются лишние гармоники полосовым LC-фильтром, настроенным на частоту 10МГц, в результате чего на выходе фильтра возникает сигнал, очень близкий к синусоидальному.
Схема аналоговой части (усилителя лазера и приемной части):
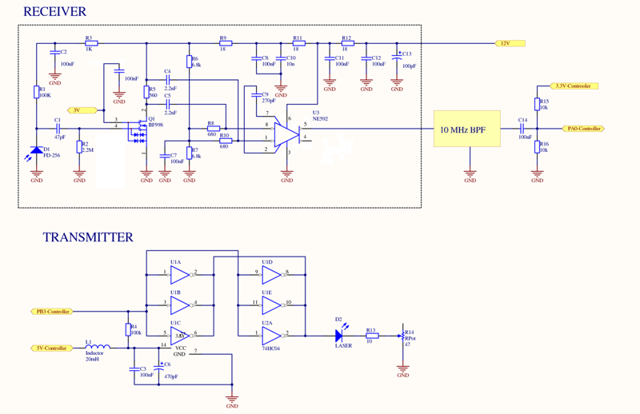
Схема была взята из проекта лазерной связи Ronja, описание на русском. В этом проекте как раз реализована передача данных со скоростью 10Mbit, что соответствует выбранной частоте модуляции.
Как видно из схемы — усилитель мощности для лазера простейший, собран на микросхеме 74HC04 (содержит 6 инверторов). Включение микросхемы не совсем корректное, но оно работает. Ток через лазер ограничивается резисторами (тоже не самое лучшее решение). Напряжение питания 5В для усилителя берется с отладочной платы.
Для того, чтобы сигнал с усилителя не наводился на остальную часть схемы, корпус усилителя сделан металлическим, все провода экранированы.
Сам лазер (красного цвета) взят из пишущего DVD-привода, его мощность можно установить достаточно высокой, и он гарантированно будет работать на частоте 10МГц.
Приемник состоит из фотодиода и усилителя, собранного на полевом транзисторе и микросхеме-высокоскоростном усилителе. Так как с увеличением расстояния освещенность фотодиода сильно падает, то усиление должно быть достаточно большим (в этой схеме оно примерно равно 4000).
Кроме того, с ростом частоты заметно падает сигнал на выходе фотодиода (сказывается его емкость). Отмечу, что усилитель в данной конструкции — важнейшая и наиболее капризная часть. Как оказалось, его усиления явно не хватает.
Изначально я предполагал, что коэффициент усиления можно будет менять (чтобы ослаблять сигнал при его слишком большой величине), используемая схема позволяет это делать, меняя напряжение на втором затворе транзистора.
Однако оказалось, что при изменении усиления достаточно сильно изменяется вносимый усилителем сдвиг фаз, что ухудшает точность измерения расстояния, так что пришлось установить коэффициент усиления на максимум, подавая на затвор транзистора напряжение 3В с батарейки.
Приемнику для работы требуется напряжение 12В, так что для его питания приходится использовать отдельный блок питания.
Усилитель очень чувствителен к внешним наводкам, так что он тоже должен быть экранированным. Я взял готовый корпус от нерабочего оптического датчика, и разместил усилитель в нем (белая полоска — фольга для дополнительного экранирования фотодиода):

Отмечу, что наводка сигнала от лазера на приемник довольно сильно ухудшает точность измерения разности фаз, так что нужно контролировать, чтобы такая наводка отсутствовала.
LC-фильтр, используемый в дальномере — взят от приемника. Так как фильтр отсекает постоянную составляющую сигнала, а АЦП отрицательные сигналы не воспринимает, то ее приходится добавлять при помощи резисторного делителя R15, R16. Постоянное напряжение, подаваемое на делитель, берется c отладочной платы (VCC).
Отладочная плата — STM32F4-DISCOVERY. Ее выбрал потому, что для формирования двух достаточно различающихся частот нужен генератор достаточно высокой частоты (PLL STM32F4 может давать частоты больше 100МГц).
В формуле, связывающей частоту модуляции и дискретизации, коэффициент «p» я принял равным 6, так что при частоте модуляции 10МГц частота дискретизации должна быть 1.6МГц.
Для формирования частоты 10МГц используется таймер TIM2, работающий в режиме формирования ШИМ сигнала. При системной частоте 160МГц его период — 16 «тиков».
АЦП получает запросы на запуск от таймера TIM2. Для формирования частоты 1.6МГц его период — 100 «тиков». Все данные от АЦП при помощи DMA сохраняются в массив, размер которого должен быть равен двойке в N степени.
Оба таймера, АЦП и DMA запускаются один раз при включении и больше уже не отключаются. Таким образом, так как таймеры тактируются от одного источника, а одному периоду измеряемого сигнала соответствуют четыре выборки данных, получается, что в массив всегда попадет целое число периодов сигнала.
Так как останавливать DMA не желательно (это упрощает управление захватом данных), при заполнении первой половины массива генерируется прерывание. Обнаружив, что половина массива заполнена, контроллер копирует ее содержимое в другой массив (в целях упрощения программы вторая половина основного массива при этом не используется).
После этого полученные данные обрабатываются — вычисляется средняя амплитуда и фаза сигнала, проводится пересчет фазового сдвига в расстояние.
Полученные величины выводятся на ЖК индикатор от кассового аппарата, также подключенный к отладочной плате.
Дальномер должен знать где находится начало отсчета. Для его калибровки при включении на «нулевом» расстоянии от дальномера устанавливается объект, после чего на отладочной плате нужно нажать кнопку, при этом измеренное значение дальности записывается в память, после чего это значение будет вычитаться из измеренной дальномером дальности.
Как я уже отмечал выше, реализовать автоматическое управление усилением не удалось. При этом изменение амплитуды принятого сигнала приводит к изменению фазовых сдвигов в усилителе, и следовательно, к дополнительным ошибкам.
Поэтому мне пришлось регулировать освещенность фотодиода при помощи механической заслонки, поворачиваемой сервоприводом — при слишком большой освещенности заслонка перекрывает световой поток.
ШИМ сигнал для управления приводом формируется таймером TIM3.
Про оптику. Без нее дальномер невозможен. Ее конструкция хорошо видна на фотографиях ниже. Лазер находится внутри пластиковой трубки, установленной вертикально. В нее вставлена небольшая втулка с зеркальной призмой. Втулку можно поворачивать, поднимать и опускать, перемещая таким образом луч лазера.
Так как я догадывался, что усиления не хватит, то для приема сигнала использовал крупную линзу Френеля.
Так так лазер, линза и фотодиод установлены соосно, то на близких расстояниях лазер закрывает от фотодиода собственный луч.
Для компенсации этого эффекта я установил вторую линзу (лупа с оправой), хотя полностью эффект не устраняется, поэтому максимальный сигнал наблюдается на расстоянии примерно 50-70 см от лазера.
- А вот и фотографии получившейся конструкции:

На индикаторе первое число — амплитуда в единицах АЦП, второе число — расстояние в сантиметрах от края доски. - Видео работы дальномера:
Дальность работы у получившегося дальномера вышла достаточно небольшая: 1,5-2 м в зависимости от коэффициента отражения объекта.
Для того, чтобы увеличить дальность, можно использовать специальный отражатель, на который нужно будет направлять луч лазера.
Для экспериментов я сделал линзовый отражатель, состоящий из линзы, в фокусе которой расположена матовая бумага.
Такая конструкция отражает свет в ту же точку, откуда он был выпущен, правда, диаметр луча при этом увеличивается.
Фотография отражателя:
Использование отражателя:
Как видно, расстояние до отражателя — 6.4 метра (в реальности было примерно 6.3). Сигнал при этом возрастает настолько, что его приходится ослаблять, направляя луч лазера на край отражателя.
Точность получившегося дальномера — 1-2 сантиметра, что соответствует точности измерения сдвига фаз — 0,2-0,5 градуса. При этом, для достижения такой точности, данные приходится слишком долго усреднять — на одно измерение уходит 0.5 сек. Возможно, это связано с использованием PLL для формирования сигналов — у него довольно большой джиттер.
Хотя я считаю, что для самодельного макета, аналоговая часть которого сделана довольно коряво, в котором присутствуют достаточно длинные провода, даже такая точность — довольно неплохо.
Отмечу, что я не смог найти в Интернете ни одного существующего проекта фазового дальномера (хотя бы со схемой конструкции), что и послужило причиной написать эту статью.
- Программа контроллера: ссылка
- iliasam
- Источник
Оптический дальномер своими руками — Pcity.su — все для ремонта дома
Доброго времени суток читающим! Наверняка не я единственный задавался вопросом приобретения, а лучше создания своими руками достаточно точного дальномера, с возможностью измерять расстояния не менее нескольких км.
Как то давно познакомился с интересным материалом, благодаря которому я научился приблизительно измерять расстояния методом «тысячных». При пользовании этим методом, как вы знаете, нужно знать размеры удаленного предмета. Кто сталкивался, знает что в горах сложно найти предмет со знакомыми размерами.
Поэтому хотелось так же иметь и другой способ, не требующий обязательных условий. Вчера в интернете случайно попалась конструкция самодельного оптического дальномера. Далее немного копипаста: «Определить расстояние на глаз трудно. Более или менее человек справляется с этой задачей на ровной местности.
Если же между предметом и наблюдателем овраг или река, то ошибиться можно в два-три раза. Точно оценить расстояние до различных предметов вам поможет зеркальный дальномер.
Сделайте из 33-мм фанеры, тонких дощечек или другого жесткого листового материала заготовки, соедините их столярным клеем в продольный футляр, оставив открытой верхнюю крышку 4. Торцевые стенки 5 делают после того, как уже склеен желоб из деталей 1, 2 и 3. Затем в верхней части коробки укрепите полоски зеркала размером 25×50 мм, как показано на рисунке.
Зеркало А приклейте намертво клеем БФ-2 к бруску, соединяющему детали 2 и 5, а зеркало Б — на лыску вращающейся оси. Вставьте эту ось нижним концом в отверстие детали 3, накройте футляр крышкой 4 так, чтобы верхний конец оси попал в отверстие детали 4.
Наденьте на верхний конец оси стрелку-указатель (из жести или алюминия), смазав место соединения клеем БФ-2, и укрепите защитный хомутик.
Следующий этан работы — градуировка. Отмерьте мерной лентой или рейкой 50 м от какого-нибудь вертикального предмета, например телеграфного столба, и встаньте на это место. Медленно поворачивая зеркало Б, совместите изображения нижней и верхней частей столба.
Отметьте положение стрелки на шкале риской и против этой риски напишите: «50 м». Затем отмерьте от столба 100 м, опять совместите изображения «половинок» столба, риской отметьте положение стрелки, написав против нее: «100 м» — и т. д.
После градуировки расстояния между рисками на глаз разделите на более мелкие части.
Точность дальномера зависит и or длины стрелки: чем она длиннее, тем большее расстояние проходит ее конец (при том же угле поворота зеркала Б). Но особенно длинной делать стрелку не стоит — интервал измеряемых расстояний от этого уменьшается. Чтобы пыль не проникала внутрь прибора, в три отверстия вставьте кусочки стекла, тонкого плексигласа или прозрачного целлулоида.
Фрезерный стол своими руками. Автор Геннадий г. Севастополь
Готовый прибор покрасьте нитро или масляной краской в защитный цвет.»
Так же в других статьях читал что можно вместо зеркал использовать лазерные указки, небольшой увеличительный прибор(мини монокль какой нибудь) Хочу узнать, сталкивался ли кто либо с таким прибором? Если да, какие тонкости в конструкции есть? Из каких подходящих деталей можно изготовить? Рекомендуемая длина прибора для более точного измерения и на большие дистанции. И вообще буду рад любым мыслям о дальномере- этом и других вообще. Спасибо!
Источник: https://nepropadu.ru/blog/J_ishy/8924.html
Самодельный дальномер. Дёшево и сердито
В общем бютжетные способы измерения расстояний. Делимся, обсуждаем, предлагаем.
Механический дальномер. Как самому сделать прибор дальномер, который позволяет сравнительно точно определять расстояния до предметов, удаленных от наблюдателя почти на 100 м. Минимальное расстояние, которое способен определить прибор, составляет 70 см. Основанием 1 дальномера служит металлическая пластина толщиной 1,5 мм и размерами 8О х 130 мм.
У одного длинного края пластины прикрепляют подвижную металлическую планку 2 шириной 18 мм, у которой отогнуты края высотой 13 мм. В одном таком крае сверят отверстие диаметром 2 мм, а в другом пропиливают паз такой же ширины. У другого длинного края пластины крепят два уголка.
В первом уголке (3) сверлят отверстие диаметром 2 мм, а во втором (5) пропиливают паз шириной 2 мм. Расстояние между отверстиями уголка и подвижной планки должно быть 65 мм — оно соответствует примерному расстоянию между центрами зрачков глаз большинства школьников.
Винт крепления подвижной планки затягивают настолько, чтобы планка могла свободно поворачиваться вокруг него. При этом будет изменяться угол между прямыми линиями, проведенными через центры отверстий и прорезей подвижной пластины и уголков, а значит, будет изменяться и угол наблюдения. Чем больше этот угол, тем дальше предмет от наблюдателя.
Остается измерить угол и по нему определить расстояние до предмета. Но мы не будем заниматься какими-либо расчетами, а сделаем такое устройство отсчета, которое позволит сразу определить величину расстояния. Устройство отсчета представляет собой ручку 4, выпиленную из алюминия, дюраля или другого металла толщиной 1,5 мм.
Обод ручки имеет поверхность с переменным радиусом кривизны относительно осевого, что позволяет при повороте ручки плавно перемещать подвижную планку.
Ручку укрепляют на таком расстоянии от планки, чтобы в положении максимального отклонения планки линии, проведенные через центры отверстий и прорезей планки и уголков, были параллельны Тогда другое крайнее положение ручки будет соответствовать минимально возможному измеряемому расстоянию Подвижная планка прижимается к ручке отсчета устройством, состоящим из ограничительной пластины 6 и пружины 7, Под один ил винтов крепления пластины зажимается конец пружины, другой конец которой вставляется в отверстие отгиба планки. Если теперь взять дальномер в руки, через отверстии и прорези можно наблюдать различные предметы. Вращая ручку отсчета, добейтесь, чтобы предмет был виден одновременно обоими глазами (для контроля нужно попеременно зажмуривать глаза). Это положение будет соответствовать определенному углу зрения, а значит, и определенному расстоянию до предмета. Величину расстояния отсчитывают по шкале напротив плоскости боковой грани ручки. Естественно, шкалу придется отградуировать самостоятельно, устанавливая предмет на заранее измеренные расстояния от места наблюдения. Сделать это несложно, и, надеемся, вы справитесь с таким заданием.
- Ещё где-то предлагали использовать ЛЦУ в спарке с оптикой.
- Ну всё, щас хомяками закидают
- Расстояние между отверстиями уголка и подвижной планки должно быть 65 мм — оно соответствует примерному расстоянию между центрами зрачков глаз большинства школьников.
Это все хорошо, только придется везде носить с собой школьнега? Теряется такое немаловажное преимущество прибора как компактность. А вообще-боян. Накопи на Никон. Я смог и всем советую.
Ну на Никон студентского бютжета не хватит , а на такое https://www.jj-connect.ru/index.php?GID=750 вполне!
Ууу, брат, это жулики. (с) ЖЖдальномеры, в принципе, дальномеры. Народ тут пользует. плюется,правда. Но всяко лучше чем твой вариант со школьнегом. Бери. Но, помни! (с)- из штатов никон за 220$ с пересылкой
Значит JJ — «дальномер» в кавычках, также как и «прицел» Tasco? Буду копить на Никон.
у меня жж-дальномер. нормальный аппарат. тока надо выбирать при покупке. измерить заведомо известное расстояние. он и через стекло авто работает устойчиво. ругать его не надо — он не стОит больше, чем за него заплатишь
+1, и ничего что там внутри антишоковая система на скотче, зато починить всегда можно в полевых устовиях
Мне тоже подарили JJ дальномер,пашет пока,проверял рулетой растояние на 55 м.Ошибка + — 1м.Максимум замерил в солн. погоду 734м
Проект интересный и дешевый вот достану метала тогда сделаю , если получится то на дальномери сэкономлю.
Как сделать дальномер своими руками
Дальномеры применяются при фотосъемках, когда требуется определить расстояние от фотоаппарата до снимаемого предмета, для того чтобы правильно настроить аппарат.
Для его постройки придется купить лишь маленькое карманное зеркало, которое должно быть хорошего качества и возможно более тонкое.
Схема устройства дальномера показана на рис. 1, а на рис. 2 показан общий вид прибора.
Как видно на рисунках, одно из зеркал устанавливается неподвижно, а второе может вращаться на оси. Неподвижное зеркало с оборотной стороны, со стороны лака и амальгамы, разделяется двумя линиями на три полоски равной ширины. Линии надо процарапать острием стальной иглы, а затем с помощью лезвия бритвы соскоблить со средней полоски лак и амальгаму.
Оба зеркала укрепляются затем с помощью жестяных скобок на деревянной планке. Для неподвижного зеркала скобка делается по рис. 3 и прикрепляется к основанию с помощью двух гвоздиков или шурупов.
Скобка для подвижного зеркала делается по рис. 4. К задней стенке скобки, точно по средней вертикальной линии, припаивается ось из булавки.
Снизу на эту ось насаживается длинный тонкий рычажок, который также припаивается к оси, но спайку эту надо произвести позже, когда будет точно определен угол между плоскостью скобки и рычагом. Для вращения оси в деревянном основании сверлится маленькое отверстие.
Кроме этих деталей, надо сделать эксцентрик, диск и пружину (рис. 1 и 2).
Неподвижное зеркало укрепляется у одного конца основания, подвижное — у другого. В середине между зеркалами сверлится отверстие, в которое вставляется ось. С одной стороны на эту ось надевается эксцентрик, а с другой—’ диск. Обе эти детали припаиваются к оси так, чтобы они вращались с некоторым трением. Полезно для этого подложить под диск пружинную шайбочку.
Укрепив эксцентрик и диск, их ставят в положение рис. 1. Теперь укрепляют пружинку, с помощью которой рычаг прижимается к ребру эксцентрика. Не сдвигая деталей, точно промеряют положение неподвижного зеркала.
Оно должно стоять под углом 45° к ребру основания. Подвижное зеркало ставят точно под тем же углом к ребру основания так, чтобы плоскости обоих зеркал были параллельны..
Заметив положение рычага, его припаивают к оси подвижного зеркала.
Крышку дальномера можно сделать из дерева, картона, жести (рис. 2). В одной из длинных стенок крышки, точно против центра неподвижного зеркала, прорезается круглое окошко для наблюдения диаметром 4—5 мм.
Точно против этого окошка в противоположной стенке прорезается квадратное окошко, равное по размерам зеркалу. Такое же квадратное окошко прорезается напротив подвижного зеркала.
В верхней стенке крышки сверлится отверстие для верхнего конца оси подвижного зеркала.
Прибор берут в руки и подносят к глазу. Глядя сквозь окошко для наблюдения, направляют прибор на какой-нибудь отдаленный предмет, например на далеко стоящий дом (расстояние должно быть не менее 80—100 м), и начинают вращать диск. Изображение дома примет вид, показанный на рис. 5 слева.
Тогда, вращая диск, следят за изображением и, когда вертикальные линии дома сольются и дои будет виден, как показано на рис. 5 справа, вращение прекращают и прибор переворачивают диском вверх.
Осторожно, чтобы не сдвинуть диск, на него наносят первое деление и рядом с ним ставят значок бесконечности (рис. 6).
Комната для мальчика: дизайн для детей разного возраста
Теперь поворачивают диск точно на полокружности и наносят второе деление. Снова приставив прибор к глазу, направляют его на какой-либо близкий предмет.
Не сдвигая диска, начинают приближаться к наблюдаемому предмету, следя за совпадением в дальномере. Отыскав такой момент, когда линии сольются, точно измеряют расстояние до предмета и наносят его на диск. Допустим, что это расстояние получилось равным 1 м.
Это значит, что прибор будет давать показания в пределах от 1 и до бесконечности.
Источник: https://umeha.3dn.ru/publ/6-1-0-6846
DIY Ультразвуковой дальномер — Набор для сборки
- Цена: 6.05$ (с купоном BGKSTDIY 4.99$)
- Плата, которую предстоит спаять, сделана не плохо, но номиналы компонентов не подписаны, так что без инструкции с табличкой соответствия номиналов обозначениям будет сложновато.
- Кратко про элементную базу.
- Контроллер STC11F02, CD4069 сборка инверторов.
CX20106A судя по описания из тех что я смог найти это предусилитель для приемника ИК сигналов пультов дистанционного управления.
Рядом резисторная сборка.
- Набор конденсаторов, кварц на 12 МГц и транзистор 8550
- Резисторы, разъемы, кроватка под микросхему и бипер.
- Ну и конечно дисплей.
- А еще в пакете есть ярлык контроля ОТК
Самодельный сканирующий лазерный дальномер / Хабр
Этот прибор, который до сих пор считается уникальным, смог найти применение практически во всех сферах человеческой жизни. Сегодня лазерный дальномер можно увидеть в руках геологов и геодезистов.
Иными словами, в тех областях человеческой деятельности, где необходимо замерить расстояние с особой точностью. Поэтому высокую популярность завоевали лазерные рулетки, отличающиеся высокой точностью, повышенной надежностью и вполне доступной ценой.
Вполне естественно звучит вопрос, можно ли сделать дальномер лазерный своими руками.
К группе приборов, которые измеряют расстояние при помощи электроники, относятся: лазерный дальномер, ультразвуковой дальномер.
Измерения лазерным дальномером делаются на основе световых потоков, носителем сигнала является электромагнитное излучение, окрашенное в соответствующий оттенок. В большинстве случаев за основу берется красный свет.
Согласно законам физики, скорость света намного превышает скорость звука, поэтому и время измерения одинакового расстояния будет отличаться.
Главные причины для установки лазерного дальномера
Использовать рулетку в некоторых случаях неудобно. За последнее десятилетие предпочтение отдается электронным устройствам.
Производство пеноблока в домашних условиях: выгодно ли это?
Они работают по принципу бесконтактного способа.
Данное устройство состоит из следующих элементов: платы, микроконтроллера, усилителя сигнала лазера, лазера, фотоприемника, фильтра. Лазерное излучение образовывается с помощью синусоидального сигнала. Его сложно получить, если частота 10 МГц.
Рекомендуется использовать меандр с необходимой частотой. При усилении сигнала, который приходит из фотоприемника, нужно убрать ненужные гармоники специальным полосовым фильтром, работающим на частоте 10 МГц.
На выходе образовывается сигнал, который напоминает синусоидальный.
Самодельный сканирующий лазерный дальномер
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков.
В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера. Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов.
Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния. Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$.
Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме. Первая версия дальномера:
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние. Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка. Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
Тут может возникнуть вопрос — зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базового расстояния), так что оно должно быть достаточно большим.
Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким. Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку.
Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки. Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера.
Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD — сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники.
В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной.
При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы. Фотография второй версии дальномера:
Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м. Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее.
Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные.
Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые. В первой и второй версии дальномера я использовал линейки TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей.
Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения. В третьей версии дальномера я решил использовать линейку ELIS-1024:
Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет. Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей.
Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ELIS-1024, как следует из названия, содержит 1024 пикселя. Она имеет аналоговый выход, и достаточно просто управляется. Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход.
Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно. В результате у меня получилась такая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора. Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):
В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах). Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер. Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК. Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть. В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух. Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании.
Фото одной из деталей сканирующей головки дальномера:
Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла.
Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Камнерезный станок своими руками чертежи
Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ.
Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется.
Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек. Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера. Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика.
Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление. Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов.
На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера. Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера. Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера.
В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера. Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
Для того, чтобы при помощи датчика можно было измерять расстояние, нужно произвести его калибровку, т.е. определить закон, связывающий результат, возвращаемый датчиком, и реальное расстояние. Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до некоторого объекта, и соответствующих им результатов.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке.
Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно.
Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера: Размер основания: 88×110 мм. Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек). Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния. При измерениях расстояния до объекта с коэффициентом отражения около 0.7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
| 1 м |






