Сила упругости
Механическое напряжение
Пусть образец растягивают, прикладывая силу vec{F}. При этом длина образца увеличивается на Delta l=l-l_{0}, где l_{0} – начальная длина, l – конечная длина.
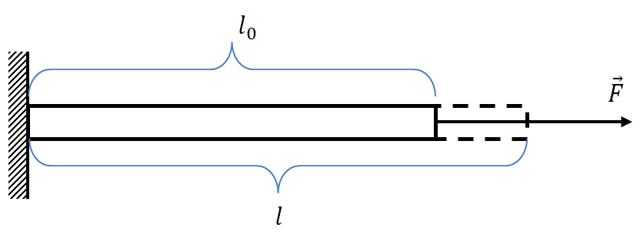
- Delta l – абсолютное удлинение.
- Определение 1: Отношение абсолютного удлинения к начальной длине образца называется относительным удлинением:
- varepsilon=frac{Delta l}{l_{0}}
- Определение 2: Отношение силы упругости к площади поперечного сечения образца называется механическим напряжением:
- sigma=frac{F}{S}
Закон Гука
- При малых удлинениях механическое напряжение пропорционально относительному удлинению:
- sigma=Emidvarepsilonmid
- Подставим sigma=frac{F}{S} и varepsilon=frac{Delta l}{l_{0}}:
- frac{F}{S}=midfrac{Delta l}{l_{0}}mid
- l_{0} – всегда положительна, поэтому получаем:
- F=frac{ES}{l_{0}}midDelta Lmid
- где коэффициент:
- k=frac{ES}{l_{0}}
- называется жесткостью./p>
- Итак:
- F=kmidDelta Lmid
- Сила упругости всегда направлена противоположно растяжению:
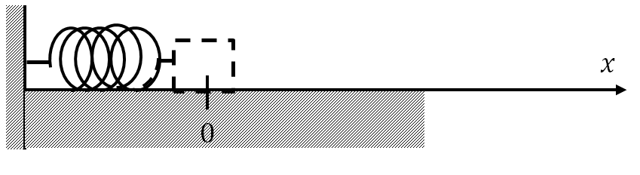
Проекция силы упругости отрицательна:
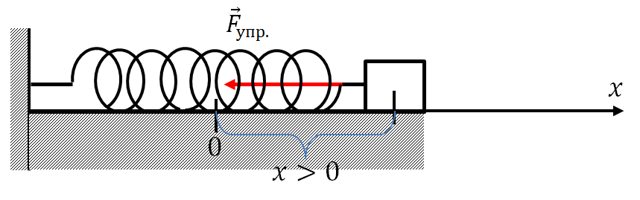
Или положительна:
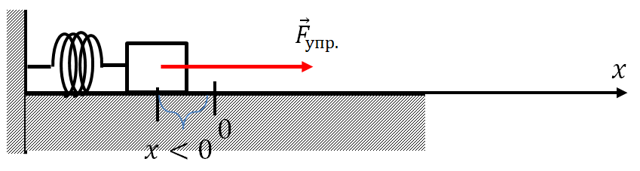
Но всегда противоположна по знаку x:
{F_{упр.}}_{x}=-kx
Параллельное и последовательное соединение пружин
- Последовательное соединение
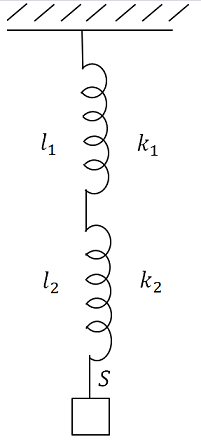
- k_{1}=frac{ES}{l_{1}} и k_{2}=frac{ES}{l_{2}}Rightarrow k=frac{ES}{l_{1}+l_{2}}
- frac{1}{k}=frac{l_{1}+l_{2}}{ES} Тогда: frac{1}{k_{1}}=frac{l_{1}}{ES} и frac{1}{k_{2}}=frac{l_{2}}{ES}
- frac{1}{k}=frac{l_{1}+l_{2}}{ES} Тогда: frac{1}{k_{1}}+frac{1}{k_{2}}=frac{l_{1}}{ES}+frac{l_{2}}{ES}=frac{l_{1}+l_{2}}{ES}=frac{1}{k}
- frac{1}{k}=frac{1}{k_{1}}+frac{1}{k_{2}}
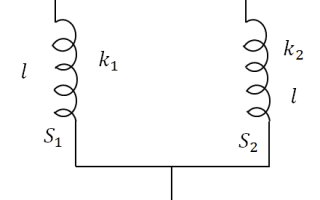
- Параллельное соединение
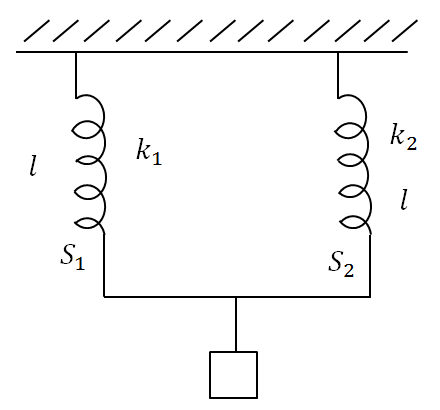
cases{k_{1}=frac{ES_{1}}{l}\k_{2}=frac{ES_{2}}{l}\k=frac{E(S_{1}+S_{2}}{l}}Rightarrow k=frac{E(S_{1}+S_{2})}{l}=frac{ES_{1}}{l}+frac{ES_{2}}{l}=k_{1}+k_{2}
k=k_{1}+k_{2}
Последовательное соединение пружин
Пружины являются важным элементом самых различных механизмов. Для изменения основных эксплуатационных свойств проводится использование нескольких подобных изделий, которые соединяются различным образом. Тип применяемого метода соединения учитывается при проведении самых различных расчетов.
Основные методы крепления пружин
При проведении расчетов уделяется внимание тому, каким образом проводится соединение пружин. Этот момент оказывает влияние на следующее:
- Жесткость системы. Этот показатель встречается практически во всех проводимых расчетах при последовательном подключении деталей. Зависит он от самых различных моментов, к примеру, коэффициента жесткости каждого.
- Требуемое усилие для сжатия или растяжения. Рассматриваемая деталь применяется часто по причине того, что может обеспечивает накопление кинетической энергии.
- Размер кинетической и потенциальной энергии. После того как изделие было выведено из положения равновесия начинает накапливаться кинетическая энергия. При этом она сохраняется на протяжении всего периода, пока к телу приложено усилие.
- Вероятность возникновения свободного колебательного движения, а также степень сопротивления подобному явлению. Для расчетов колебательного движения также применяются специальные формулы.
Бывают самые различные способы соединения пружин, но наибольшее распространение получил метод последовательного и параллельного подключения.
Они характеризуются довольно большим количеством особенностей. Прежде чем рассматривать применение подобных способов соединения следует уделить внимание особенностям самого изделия:
- Деталь изготавливается из проволоки, которая получается методом проката. Она обладает высоким показателем упругости, а также устойчивостью к воздействию окружающей среды.
- Прокат изготавливают из специального сплава, способного выдерживать периодическую деформацию. Под заказ может производится деталь из обычных углеродистых сплавов или легированных металлов, все зависит от конкретного случая.
- Проволока накручивается в виде колец по спирали. При этом должна выдерживаться едина ось, которая определяет распространение силы в одном направлении.
- Выделяют два основных типа детали: растяжения и сжатия. Первый вариант исполнения характеризуется тем, что витки находятся практически вплотную. В случае изготовления изделия для сжатия выдерживается определенный зазор, который позволяет кольцам сближаться, а самому изделию сжиматься.
- Характеризуется изделие самыми различными показателями. Примером можно назвать диаметр проволоки, созданных колец из нее, шаг расположения витков. Все эти параметры указываются в технической документации.
Сегодня они встречаются практически повсеместно. Это связано с тем, что подобное изделие практически незаменимо в случае, когда требуется возвратно-поступательное движение.
Последовательное соединение
При создании многих механизмов применяется последовательное соединение пружин. Среди особенностей этого метода отметим нижеприведенные моменты:
- Наиболее важным параметром можно назвать коэффициент жесткости. Он определяет практически все свойства детали. Коэффициент жесткости при последовательном соединении пружин равен каждому из показателей упругости.
- Также не стоит забывать о том, что показатель смещения тела равен сумме деформации витков. Любой тип рассматриваемого изделия характеризуется максимальным удлинение и сжатием. В случае максимального сжатия кольца расположены вплотную, зазор отсутствует практически полностью. При растяжении есть вероятность деформации витков, из-за чего изделие попросту потеряет свои основные характеристики.
Для расчетов могут применяться самые различные формулы. Среди особенностей этого метода соединения пружин отметим следующее:
- Для начала берется одна деталь с жесткостью K, сила растяжения выражается следующей формулой: x=F/k.
- Следующий шаг заключается в подсоединении второй детали. Для этого могут применяться различные крепежные элементы. При этом две пружины разной длины будут находится в одной системе.
- Если приложить усилие для растягивания обоих изделий, то сила упругости каждой будет равна по модулю. При этом удлинение каждой будет равно х.

Приведенная выше информация указывает на то, что упругость системы двух последовательно соединенных изделий будет примерно в два раза меньше. При этом удлинение будет равно сумме удлинения каждой в отдельности.
Применяемый метод соединения получил весьма широкое распространение. Однако, в некоторых случаях целесообразно применять параллельный метод соединения.
Параллельное соединение
Довольно часто встречается и параллельное соединение пружин. В этом случае смещение тела, которому передается сила, равна деформации каждой из них. Зачастую параллельно соединенные пружины используются тогда, когда нужно передать большее усилие. Особенностями этого метода назовем следующее:
- В рассматриваемом случае жесткости пружины обозначаются буквой k. Построенная схема указывает на то, что жесткость пружин при параллельном соединении остается неизменной, но общий показатель возрастает в два раза.
- Показатель удлинения остается неизменным. При этом сила упругости возрастает в два раза в случае, если обе детали обладают схожими эксплуатационными характеристиками.
Проблемой применения подобной системы можно назвать то, что обе детали должны обладать одинаковой длиной в состоянии покоя. В противном случае сила упругости будет распределяться неравномерно, при этом есть вероятность критической деформации одной из них.
Влияние сопротивления на свободные колебания
Особенности детали определяют то, что при ее применении есть вероятность возникновения свободного колебательного движения. При этом имеет значение, какими особенностями обладает параллельно и последовательно соединенные пружины. Среди особенностей влияния сопротивления на свободное колебание отметим следующие моменты:
- Проведенные тесты указывают на то, что параллельно соединенные пружины препятствуют возникновению свободного колебания. Это можно связать с существенным увеличением жесткости всей системы.
- При последовательном расположении есть вероятность снижения сопротивления, так как расстояние между точкой крепления и телом существенно увеличивается.
Именно поэтому для существенного снижения колебательного вращения на момент эксплуатации системы рекомендуется использовать параллельный метод подключения.
Еще одним важным показателем можно назвать динамику несвободного движения. Она может варьировать в достаточно большом диапазоне.
Распространенные последовательно соединенные пружины могут обеспечивать условия для несвободного движения тела. Динамика может нарастать в зависимости от длины в свободном состоянии и передаваемого усилия.
Как определить жесткость системы при последовательном соединении пружин?
Довольно большое количество проблем возникает на момент вычисления жесткости системы при последовательном соединении. Особенностями проводимого расчета в этом случае назовем следующее:
- Важным показателем можно назвать жесткость, которая варьирует в достаточно большом диапазоне. Она во многом определяет свойства изделия. При слишком большой жесткости приходится прикладывать большее усилие для растяжения или сжатия детали.
- Телу придается определенное усилие (F), которое становится причиной удлинения тела на величину x.
- Для расчета применяется формула: k=F/(2x)=1/2F/x=k/2.
Приведенная выше информация указывает на то, что жесткость всей системы в этом случае в два раза меньше показателя жесткости каждого изделия. При этом формула применима только в том случае, если применяемые варианты исполнения для соединения обладают одинаковыми эксплуатационными характеристиками.
Определить жесткость системы пружин можно при самостоятельном проведении соответствующих расчетов. Сегодня система двух пружин получила весьма широкое распространение, так как при ее применении можно добиться требующихся результатов. Однако, прежде чем ее использовать следует провести соответствующие расчеты.
Последовательное соединение пружин : жесткость, формула
Класс «А» и «В» – существенны ли отличия
Для многих автолюбителей жесткость пружин по цветам равносильна жесткости по классам. Класс «А», независимо от цвета, более жесткий, нежели класс «В». На самом деле это не совсем верное утверждение.
Класс «А» действительно больше подходит для автомобилей, которые часто эксплуатируются с высокой нагрузкой. Но разница здесь совсем невелика – порядка 25 кг. Несмотря на обязательное нанесение маркировки, до сих пор встречаются образцы, на которых она отсутствует.
В таком случае, даже если цветовая маркировка элементов идентична, от их покупки и использования лучше отказаться. Многими автомобилистами недооценивается значение качественных пружин, особенно при интенсивной эксплуатации автомобиля.
Пружины не зря имеют маркировку по цветам – так гораздо проще сориентироваться начинающему водителю, который впервые занимается собственноручной заменой этого элемента.
Приобретение изделий надлежащего качества, пусть и по более высокой цене, неизбежно окупится более мягкой ездой, меньшим износом автомобиля, а также меньшими нагрузками на самого водителя. Научно доказано, что высокие вибрационные нагрузки на человека приводят к быстрой утомляемости и снижению концентрации при движении.
Сила упругости и закон Гука
Виды и типы пружин Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется.
Деформация — это изменение размеров или формы тела под влиянием внешних сил.
Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня.
В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу».
Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).
Закон Гука
Пружину можно сжимать, растягивать, изгибать или скручивать. В каждом из этих случаев будут возникать силы упругости, стремящиеся вернуть форму и размеры пружины в начальное состояние.
Для понимания основных закономерностей будем рассматривать только линейные сжатия и растяжения (вдоль оси х).
Для вычисления сил при деформациях изгибов и скручивании требуется применение более сложного математического аппарата.
Рис. 1. Деформации растяжения и сжатия пружины.
- Если начальная длина, ненапряженной пружины, равна L, то для малых деформаций выполняется закон Гука, открытый экспериментально:
- $ F_уп = − k * Δх $ (1),
- где, в формуле силы упругости пружины:
- Fуп — сила упругости пружины, Н;
- k — коэффициент жесткости пружины, Н/м;
- Δх —величина деформации (дельта икс), м.
- Величина малых деформаций должна быть намного меньше начальной длины пружины:
- $ Δх 0 — растяжение, и Δх
Принцип работы плазменной сварки, доступные способы
- Сила трения скольжения
- Сила тяжести
- Сила упругости
- Механическое движение
- Равнодействующая сила
- Неравномерное движение
- Взаимодействие тел
- Сила трения покоя
- Единица измерения массы
- Сила трения покоя
- Сила трения качения
- Причины возникновения силы трения
- Ускорение силы тяжести
- Сила упругости пружины
- Равномерное и неравномерное движение
показать все
По многочисленным просьбам теперь можно: сохранять все свои результаты, получать баллы и участвовать в общем рейтинге.
- 1. Юлия Казакова 275
- 2. Миша Дегтярев 261
- 3. Алина Сайбель 140
- 4. Екатерина Онегина 103
- 5. Алина 98
- 6. Марк Абрамов 90
- 7. Алю Миний 87
- 8. Дмитрий Аравин 75
- 9. Ибрагим Мургустов 73
- 10. Надежда Лавренова 72
- 1. Мария Николаевна 12,965
- 2. Лариса Самодурова 12,285
- 3. Liza 11,735
- 4. TorkMen 10,966
- 5. Кристина Волосочева 10,910
- 6. Ekaterina 10,791
- 7. Лиса 10,720
- 8. Юлия Бронникова 10,580
- 9. Влад Лубенков 10,540
- 10. Вячеслав 10,530
Самые активные участники недели:
- 1. Виктория Нойманн — подарочная карта книжного магазина на 500 рублей.
- 2. Bulat Sadykov — подарочная карта книжного магазина на 500 рублей.
- 3. Дарья Волкова — подарочная карта книжного магазина на 500 рублей.
Три счастливчика, которые прошли хотя бы 1 тест:
- 1. Наталья Старостина — подарочная карта книжного магазина на 500 рублей.
- 2. Николай З — подарочная карта книжного магазина на 500 рублей.
- 3. Давид Мельников — подарочная карта книжного магазина на 500 рублей.
Чему равна жесткость системы из двух параллельно соединенных пружин?
Почему при параллельном соединении пружин?
Довольно часто встречается и параллельное соединение пружин. В этом случае смещение тела, которому передается сила, равна деформации каждой из них. … Построенная схема указывает на то, что жесткость пружин при параллельном соединении остается неизменной, но общий показатель возрастает в два раза.
Какой формулой определяется коэффициент жесткости соединения из двух параллельных пружин?
Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так: k = k1 + k2 + … + ki.
В чем обозначается жесткость пружины?
Обозначается буквой k, иногда D или c.
Как найти упругость пружины?
Определение коэффициента жесткости растяжения
Измеряется длина пружины с подвешенным грузом – L2. Если взять груз массой 100гр., то он будет воздействовать силой в 1Н (Ньютон) – величина F; Вычисляется разница между последним и первым показателем длины – L; Рассчитывается коэффициент упругости по формуле: k = F/L.
В чем измеряется жесткость?
В системе СИ коэффициент механической жёсткости измеряется в ньютонах на метр (Н/м).
В чем измеряется сила пружины?
В Международной системе единиц (СИ) сила упругости так же, как и все другие силы, измеряется в ньютонах (русское обозначение: Н; международное: N).
Чему равны IUR при последовательном соединении проводников?
Проводники в электрических цепях могут соединяться последовательно и параллельно. При последовательном соединении проводников (рис. 1.9.1) сила тока во всех проводниках одинакова: I1 = I2 = I.
Как найти общую жёсткость двух пружин?
Общее удлинение системы пружин будет х = х₁ + х₂, тогда общую жесткость k получим из равенства: F/k = F/k₁ + F/k₂, так как х = F/k.
Как течет ток при параллельном соединении?
При параллельном соединении при протекании тока из точки А в точку Б, он имеет несколько путей. Таким образом, увеличение числа параллельно соединенных резисторов ведет к увеличению путей протекания тока, то есть к уменьшению противодействия протеканию тока.
Что происходит при последовательном соединении конденсаторов?
При последовательном соединении конденсаторов уменьшается общая емкость и увеличивается общее напряжение конденсаторов. А общее напряжение будет равняться сумме напряжений всех конденсаторов. Например: мы имеем три конденсатора по 30 мкФ x 100 В каждый.
Как рассчитать емкость конденсатора при последовательном соединении?
Общая емкость равнозначного (эквивалентного) конденсатора C = Q / U = Q / (U1 + U2 + U3), т. е. при последовательном соединении конденсаторов величина, обратная общей емкости, равна сумме обратных величин емкостей отдельных конденсаторов.
Чем отличается последовательное соединение от параллельного?
При последовательном соединении проводников сила тока во всех проводниках одинакова. При этом общее напряжение в цепи равно сумме напряжений на концах каждого из проводников. При параллельном соединении падение напряжения между двумя узлами, объединяющими элементы цепи, одинаково для всех элементов.
Как посчитать параллельное соединение резисторов?
Расчет сопротивления при параллельном подключении производится по формуле: RT = 1 / (1/R1 + 1/R2 + 1/R3 + 1/Rn..) Расчет сопротивления при последовательном подключении производится по формуле: RT = R1 + R2 + R3 + Rn..
Интересные материалы:
Сколько населения в Орловской области? Сколько населения в Воронеже на сегодняшний день? Сколько населенных пунктов в Алматинской области? Сколько не портится творог в холодильнике? Сколько нефти в Аляске? Сколько никотина в табаке щербет? Сколько носят траур по дедушке? Сколько нужно дров на зиму? Сколько нужно дрожжей Саф Левюр на кг сахара? Сколько нужно гороха на 3 литра супа?
Последовательное соединение пружин : жесткость, формула
Для многих автолюбителей жесткость пружин по цветам равносильна жесткости по классам. Класс «А», независимо от цвета, более жесткий, нежели класс «В». На самом деле это не совсем верное утверждение.
Класс «А» действительно больше подходит для автомобилей, которые часто эксплуатируются с высокой нагрузкой. Но разница здесь совсем невелика – порядка 25 кг. Несмотря на обязательное нанесение маркировки, до сих пор встречаются образцы, на которых она отсутствует.
В таком случае, даже если цветовая маркировка элементов идентична, от их покупки и использования лучше отказаться. Многими автомобилистами недооценивается значение качественных пружин, особенно при интенсивной эксплуатации автомобиля.
Пружины не зря имеют маркировку по цветам – так гораздо проще сориентироваться начинающему водителю, который впервые занимается собственноручной заменой этого элемента.
Приобретение изделий надлежащего качества, пусть и по более высокой цене, неизбежно окупится более мягкой ездой, меньшим износом автомобиля, а также меньшими нагрузками на самого водителя. Научно доказано, что высокие вибрационные нагрузки на человека приводят к быстрой утомляемости и снижению концентрации при движении.
Сила упругости и закон Гука
Виды и типы пружин Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется.
Деформация — это изменение размеров или формы тела под влиянием внешних сил.
Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня.
В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу».
Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).
Видео
- Из этого видео вы узнаете, как определить жесткость пружины.
- Последовательное соединение пружин:
- 1/kобщ = 1/k1 + 1/k2 +. + 1/kn
- Либо, если это две последовательно соединенные пружины, то можно использовать следующую формулу:
Однако, нам следует еще вспомнить закон Гука: F = kl В последовательном соединении имеется n пружин с жесткостями k1, k2, и так далее. Из закона Гука следует, что F = kl.
Сумма удлинений каждой пружины равна общему удлинению всего соединения l(или х, по разному в учебниках пишется)1 + l2+. + ln = lc. (кстати, это одно из свойств последовательно соединения) По закону Гука получим мы можем вывести следующее уравнение: l = F/k, l1 = F/k1 и т. Д.
Собственно, далее из этого выражения следует: 1/kобщ = 1/k + 1/k +. + 1/kn. Собственно, отсюда получаем: kобщ = 1/1/k + 1/k +. + 1/kn. Ну и как вы уже поняли, k пойдет наверх, и оно будет обратно пропорционально числителю, который в свою очередь зависит от коэффициента жесткости.
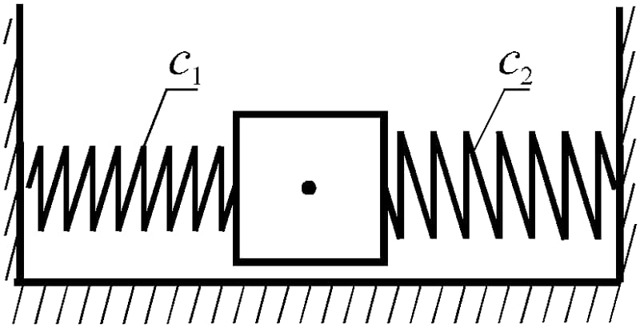
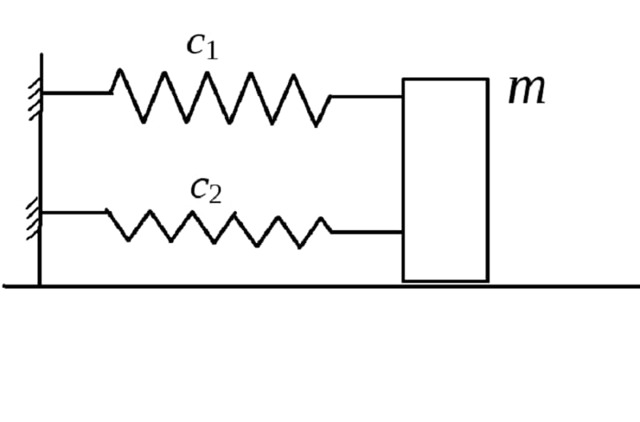
При параллельном соединении двух пружин, имеющих коэффициенты жесткости с
1,с 2 (рис. 2.5), смещение тела равно деформации каждой из пружин:
Читать также: Мачете из рессоры своими руками
. (2.9)
Р
ис. 2.5 Параллельное соединение пружин
- Сила упругости эквивалентной пружины с коэффициентом жесткости с
- * будет равна сумме сил упругости двух установленных пружин, откуда с учетом (2.9) получаем
- ,
. (2.10)
Формула определения жесткости
Съемник пружин амортизаторов чертеж
Изучаемая современными школьниками формула, как найти коэффициент жесткости пружины, представляет собой соотношение силы и величины, показывающей изменение длины пружины в зависимости от величины данного воздействия (или
равной ему по модулю силы упругости). Выглядит эта формула так: F = –kx. Из этой формулы коэффициент жесткости упругого элемента равен отношению силы упругости к изменению его длины. В международной системе единиц физических величин СИ он измеряется в ньютонах на метр (Н/м).
Другой вариант записи формулы: коэффициент Юнга
Деформация растяжения/сжатия в физике также может описываться несколько видоизмененным законом Гука.
Формула включает значения относительной деформации (отношения изменения длины к ее начальному значению) и напряжения (отношения силы к площади поперечного сечения детали).
Относительная деформация и напряжение по этой формуле пропорциональны, а коэффициент пропорциональности – величина, обратная модулю Юнга.
Модуль Юнга интересен тем, что определяется исключительно свойствами материала, и никак не зависит ни от формы детали, ни от ее размеров.
К примеру, модуль Юнга для ста
ли примерно равен единице с одиннадцатью нулями (единица измерения – Н/кв. м).
Смысл понятия коэффициент жесткости
Коэффициент жесткости – коэффициент пропорциональности из закона Гука. Еще он с полным правом называется коэффициентом упругости.
Фактически он показывает величину силы, которая должна быть приложена к упругому элементу, чтобы изменить его длину на единицу (в используемой системе измерений).
Значение этого параметра зависит от нескольких факторов, которыми характеризуется пружина:
- Материала, используемого при ее изготовлении.
- Формы и конструктивных особенностей.
- Геометрических размеров.
По этому показателю можно сд
елать вывод, насколько изделие устойчиво к воздействию нагрузок, то есть каким будет его сопротивление при приложении внешнего воздействия.
Особенности расчета пружин
Показывающая, как найти жесткость пружины, формула, наверное, одна из наиболее используемых современными конструкторами. Ведь применение эти упругие детали находят практически везде, то есть требуется просчитывать их поведение и выбирать те из них, которые будут идеально справляться с возложенными обязанностями.
Ремонт резонатора своими руками без сварки
Закон Гука весьма упрощенно показывает зависимость деформации упругой детали от прилагаемого усилия, инженерами используются более точные формулы расчета коэффициента жесткости, учитывающие все особенности происходящего процесса.
- Цилиндрическую витую пружину современная инженерия рассматривает как спираль из проволоки с круглым сечением, а ее деформация под воздействием существующих в системе сил представляется совокупностью элементарных сдвигов.
- При деформации изгиба в качестве деформации рассматривается прогиб стержня, расположенного концами на опорах.
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c.
Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр).
Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
Читать также: Чем обрабатывать сварочный шов нержавейки
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Последовательно-параллельное соединение источников питания
Соединение транзисторов
А кто вам мешает соединять аккумуляторы или батарейки сразу и последовательно и параллельно? Но разве так можно? Можно). На примере с водобашнями это может выглядеть вот так:
Здесь мы видим две башни, каждая из которых состоит их двух башенок, и эти две большие башни соединены с помощью трубы.
Очень часто последовательно-параллельное соединение используется в электротранспорте. Недавно я делал батарею для своего электровелосипеда из li-ion аккумуляторов 18650. Для моего электробайка требовалось напряжение в 36 Вольт. Итак, теперь включаем логику. Один аккумулятор выдает 3,6 Вольт. Чтобы получить 36 Вольт, мне надо соединить 10 аккумуляторов последовательно.
Чтобы было проще для понимания, я их нарисую не по ГОСТу:
Ура! Я получил 36 Вольт для своего электровелосипеда. Но вот проблема в том, что один такой аккумулятор может отдать в нагрузку силу тока 2800 миллиАмпер в течение 1 часа или 2,8 Ампер в течение 1 часа. Такой параметр указывается на аккумуляторах как mAh. Об этом я подробно писал в этой статье “Как измерить ток и напряжение мультиметром“.
То, что я все аккумуляторы соединил последовательно, не означает, что их емкость возросла в 10 раз. В 10 раз возросло только напряжение, так как я их соединил последовательно. То есть общая сумма получилась 36 Вольт и все те же самые 2800 mAh как и у одного аккумулятора.
Поэтому, чтобы увеличить емкость, я должен в параллель этой ветви соединить точно такую же ветвь из аккумуляторов, иначе мой электровелосипед не проедет и пару тройку километров. Я ведь хочу кататься весь день!
Сказано – сделано. Цепляем еще одну ветвь в 36 Вольт. Вы ведь не забыли правило, что при параллельном соединении у нас напряжение должно быть одинаково? В результате мы получаем что-то типа этого:
Итого, мы получили те же самые пресловутые 36 Вольт, но вот емкость увеличилась в два раза. 2800 mAh +2800 mAh = 5600 mAh. Ну вот, с такой батареей можно проехать уже чуть дальше. Но мне этого тоже показалось мало, поэтому я добавил еще 2 ветви. В результате моя самопальная батарея для электровелосипеда схематически, по идее, должна выглядеть вот так:
Как определить жесткость системы при последовательном соединении пружин?
Довольно большое количество проблем возникает на момент вычисления жесткости системы при последовательном соединении. Особенностями проводимого расчета в этом случае назовем следующее:
- Важным показателем можно назвать жесткость, которая варьирует в достаточно большом диапазоне. Она во многом определяет свойства изделия. При слишком большой жесткости приходится прикладывать большее усилие для растяжения или сжатия детали.
- Телу придается определенное усилие (F), которое становится причиной удлинения тела на величину x.
- Для расчета применяется формула: k=»F/(2x)=1/2F/x=k/2.
Приведенная» выше информация указывает на то, что жесткость всей системы в этом случае в два раза меньше показателя жесткости каждого изделия. При этом формула применима только в том случае, если применяемые варианты исполнения для соединения обладают одинаковыми эксплуатационными характеристиками.
Определить жесткость системы пружин можно при самостоятельном проведении соответствующих расчетов. Сегодня система двух пружин получила весьма широкое распространение, так как при ее применении можно добиться требующихся результатов. Однако, прежде чем ее использовать следует провести соответствующие расчеты.
Жесткость пружин при последовательном и параллельном соединении
При параллельном соединении двух пружин, имеющих коэффициенты жесткости с1, с2 (рис. 2.5), смещение тела равно деформации каждой из пружин:
Сила упругости эквивалентной пружины с коэффициентом жесткости с* будет равна сумме сил упругости двух установленных пружин, откуда с учетом (2.9) получаем
Последовательное соединение пружин
При последовательном соединении двух пружин, имеющих коэффициенты жесткости с1, с2 (рис. 2.6), смещение тела равно сумме деформаций пружин:
Рис. 3.6 Последовательное соединение пружин
Сила упругости эквивалентной пружины с коэффициентом жесткости с* будет равна каждой из сил упругости установленных пружин, откуда
Окончательно с учетом (2.11) получаем
Влияние сопротивления на свободные колебания
Пусть на точку массы m, совершающую прямолинейное движение, действуют две силы (рис. 2.7):
- Восстанавливающая сила (сила упругости пружины): .
- Сила сопротивления, пропорциональная скорости движения точки (сила сопротивления демпфера): .
Рис. 2.7 Движение массы с демпфированием
- Дифференциальное уравнение движения точки запишется как
- ;
- ,
- , , (2.13)
- получаем линейное однородное дифференциальное уравнение 2-го порядка с постоянными коэффициентами:
. (2.14)
- Характеристическое уравнение имеет вид
- , (2.15)
- его корни равны
- , (2.16)
- где – дискриминант.
Как известно из курса высшей математики, общее решение дифференциального уравнения (2.14) существенно зависит от знака дискриминанта , т.е. от соотношения между b и k.
1-й случай (малое сопротивление): b k , D 0.
Обозначим , причем k* k. Тогда корни (2.16) характеристического уравнения будут комплексно сопряженными:
- ,
- Общее решение дифференциального уравнения (2.14) в данном случае имеет вид
- , (2.17)
это затухающие колебания с частотой k * и периодом (рис.3.8).
Амплитуда колебаний убывает со временем. Отношение последующей амплитуды к предыдущей называется декрементом затухания:
* k) и к увеличению их периода (Т * > Т).
Корни (2.16) характеристического уравнения получаются кратные, , и решение дифференциального уравнения (2.14) приобретает вид
. (2.19)
Поскольку экспонента убывает быстрее, чем растёт линейная функция времени, в зависимости от начальных условий движения получим ту или иную картину затухающего апериодического (т.е. не колебательного) движения (рис.2.9).
Самодельный заточной станок для дисковых пил
- 3-й случай (большое сопротивление): b > k, D > 0.
- В этом случае обозначим >0, и оба корня (2.16) характеристического уравнения будут действительными и отрицательными:
- Силы упругости возникают при деформации тел.
- Вычисление силы упругости производится по закону Гука :
- где k — коэффициент жесткости (упругости) пружины; Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l 0 — длина пружины в недеформированном состоянии, l — длина растянутой (или сжатой) пружины.
Направление силы упругости F → упр (рис. 2.9) противоположно направлению силы, вызывающей деформацию:
- Относительная деформация определяется отношением:
- ε = Δ x l 0 или ε = Δ x l 0 ⋅ 100 % ,
- где Δ x = | l − l 0 | — абсолютная деформация (растяжения или сжатия) пружины, l 0 — длина недеформированной пружины, l — длина растянутой (сжатой) пружины.
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости вычисляется для последовательного соединения по формуле (рис. 2.10)
1 k = 1 k 1 + 1 k 2 + . + 1 k N ;
где k 1 , k 2 , . k N — коэффициенты жесткости (упругости) этих пружин.
Коэффициент жесткости (упругости) k нескольких пружин одинаковой длины , но разной жесткости (рис. 10), вычисляется для параллельного соединения по формуле (рис. 2.11)
k = k 1 + k 2 + . + k N ,
где k 1 , k 2 , . k N — коэффициенты жесткости (упругости) этих пружин.
- для последовательного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k 0 :
для параллельного соединения N одинаковых пружин с коэффициентами жесткости (упругости) k 0 :
Пример 16. При последовательном соединении трех пружин, коэффициенты жесткости которых относятся как 1 : 2 : 3, сила 12 Н вызвала растяжение системы на 4,0 см. Рассчитать коэффициенты жесткости указанных пружин.
- Решение. Величина силы упругости, действующей на пружину, определяется формулой
- F упр = k общ ∆ x ,
- где k общ — коэффициент жесткости составной пружины; ∆ x — указанное в условии задачи растяжение пружины.
- Величина силы упругости, с другой стороны, совпадает с величиной приложенной силы:
- Значение данной силы и величина растяжения пружины под действием этой силы позволяют рассчитать коэффициент жесткости составной пружины:
- k общ = F Δ x = 12 4,0 ⋅ 10 − 2 = 300 Н/м.
Схема сварочного аппарата постоянного тока своими руками
- Для определения коэффициентов жесткости каждой пружины запишем их коэффициенты жесткости в следующем виде:
- так как указанные коэффициенты по условию задачи соотносятся между собой как
- k 1 : k 2 : k 3 = 1 : 2 : 3.
- Для расчета величины k запишем формулу для коэффициента жесткости пружины, состоящей из трех последовательно соединенных пружин, и подставим в нее выражения k 1 , k 2 , k 3 :
- 1 k общ = 1 k 1 + 1 k 2 + 1 k 3 = 1 k + 1 2 k + 1 3 k = 11 6 k , или k общ = 6 k 11 .
- Найденное ранее значение k общ = 300 Н/м позволяет рассчитать k = 550 Н/м.
- Тогда коэффициенты жесткости каждой из пружин имеют значения:
- k 2 = 2 k = 1100 Н/м;
- k 3 = 3 k = 1650 Н/м.
Пример 17. Вычислить абсолютную деформацию пружины с коэффициентом жесткости 100 Н/м, присоединенной к бруску, лежащему на горизонтальной поверхности, в момент начала скольжения бруска по поверхности. Сила, вызывающая скольжение бруска, прикладывается к пружине. Коэффициент трения между бруском и поверхностью равен 0,1. Масса бруска составляет 1,0 кг.
Решение. На рисунке показаны силы, действующие на брусок.
- Абсолютную деформацию пружины рассчитаем по формуле
- где F упр = F — модуль силы упругости, возникающей в пружине (величина силы упругости равна величине приложенной силы); k — коэффициент жесткости пружины.
- Со стороны пружины на брусок действует сила, модуль которой совпадает с силой упругости:
- В момент начала скольжения величина силы трения равна силе, приложенной к бруску в направлении движения:
- где µ — коэффициент трения; N = mg — модуль силы нормальной реакции опоры.
- Поэтому величина силы упругости может быть вычислена по формуле
- Из исходного уравнения следует, что величина деформации пружины в момент начала скольжения определяется выражением
- Расчет позволяет определить ее значение:
- Δ x = 0,1 ⋅ 1,0 ⋅ 10 100 = 10 − 2 м = 1,0 см .
Пример 18. Вычислить массу груза, подвешенного к пружине жесткостью 250 Н/м, если известно, что относительная деформация пружины составляет 25 %. Длину нерастянутой пружины считать равной 100 мм.
Решение. Проиллюстрируем условие задачи рисунком.
- Сила упругости определяется формулой
- где k — коэффициент жесткости (упругости) пружины; ∆ x = l − l 0 — абсолютная деформация пружины (величина ее растяжения под действием груза); l 0 — длина недеформированной пружины; l — длина пружины в деформированном состоянии.
Как правильно выбрать блендер для дома отзывы
- Из определения относительной деформации
- где ε = 0,25 — относительная деформация (в долях).
- С учетом значения относительной деформации формула для вычисления силы упругости принимает вид:
- F упр = k ε l 0 = 0,25 k l 0 .
- С другой стороны, сила упругости, возникающая в пружине, численно равна весу тела, вызвавшего деформацию пружины:
- где m — масса тела; g — модуль ускорения свободного падения.
- Таким образом, имеем равенство
- позволяющее вычислить массу груза, подвешенного к пружине:
- m = 0,25 k l 0 g = 0,25 ⋅ 250 ⋅ 0,100 10 = 0,625 кг = 625 г .
9. Чему равна жёсткость системы двух последовательно соединенных пружин жёсткостью 200 Н/м и 50 Н/м?
В этом примере жёсткость системы двух последовательно соединённых пружин оказалась меньше, чем жёсткость каждой пружины. Всегда ли это так?
10. Докажите, что жёсткость системы двух последовательно соединённых пружин меньше жёсткости любой из пружин, образующих систему.
Параллельное соединение пружин
На рисунке 15.7 слева изображены параллельно соединённые одинаковые пружины.
Обозначим жёсткость одной пружины k, а жёсткость системы пружин kпар.
11. Докажите, что kпар = 2k.
П о д с к а з к а. См. рисунок 15.7.
Итак, жёсткость системы из двух одинаковых параллельно соединённых пружин в 2 раза больше жёсткости каждой из них.
12. Докажите, что при параллельном соединении двух пружин жёсткостью k1 и k2
П о д с к а з к а. При параллельном соединении пружин их удлинение одинаково, а сила упругости, действующая со стороны системы пружин, равна сумме их сил упругости.
13. Две пружины жёсткостью 200 Н/м и 50 Н/м соединены параллельно. Чему равна жёсткость системы двух пружин?
14. Докажите, что жёсткость системы двух параллельно соединённых пружин больше жёсткости любой из пружин, образующих систему.