Рассмотрим порядок построения планов скоростей и ускорений точек звеньев на примере кинематического исследования плоского рычажного механизма (рисунок 1).
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное – движение данной точки относительно той, движение которой принято за переносное:
![]()
На плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана.
На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает. Отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек.
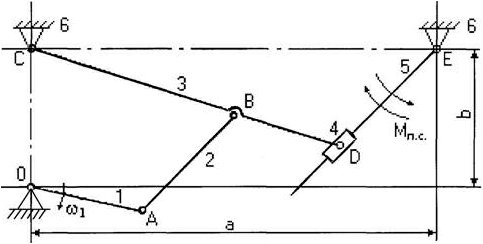
Рисунок 1 – Кинематическая схема плоского рычажного механизма
Другие примеры решений >
Помощь с решением задач >
Рассмотрим построение планов для механизма, представленного на рисунке 1. Вначале рассматривается начальный механизм, а далее решение ведется по группам Ассура в порядке их присоединения.
Начальный механизм:
![]()
Здесь
![]()
По вычисленному значению VA выбираем масштаб плана скоростей KV и из произвольного полюса откладываем отрезок va изображающий эту скорость:
Можно также назначать отрезок va а масштаб KV вычислять:
Группа Ассура второго класса 1-го вида (звенья 2, 3):
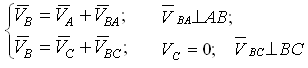
Истинные значения (в м/с) относительных скоростей VBA и VBC определяются после построения плана умножением соответствующих отрезков (в мм) на масштаб плана:
а зная их, можно определить и угловые скорости звеньев 2 и 3:
Скорость точки D на плане скоростей можно определить по подобию.
(Если известны скорости двух точек одного и того же звена, то скорость любой третьей точки этого же звена можно определить, построив на плане скоростей фигуру, подобную фигуре, образованной этими же буквами на звене механизма). Точки С, В , D на звене 3 лежат на одной прямой. На плане строим отрезок сd, соблюдая условие подобия:
Группа Ассура второго класса 3-го вида (звенья 4,5) :
где D5 — точка, находящаяся на звене 5 под точкой D. После определения скорости движения точки D5 относительно точки E можно вычислить угловую скорость звеньев 4 и 5 (ω4=ω5, т. к. эти звенья соединяются поступательной парой):
Примечание: в данном случае размер DE является величиной переменной (т.е. в задании он отсутствует), поэтому в каждом положении механизма он определяется через отрезок на чертеже и масштаб длин.
План ускорений строится в таком же порядке.
Начальный механизм
Ускорение точки A состоит только из нормальной составляющей, т.к. задана постоянная угловая скорость первого звена (ω1=соnst):
По вычисленному значению ускорения точки A выбирается масштаб плана ускорений и определяется отрезок на плане, соответствующий этому ускорению (или вычисляется масштаб плана ускорений по выбранному отрезку, изображающему ускорение точки A):
Здесь точка w – полюс плана ускорений.
Группа Ассура (звенья 2,3) второго класса 1-го вида:
После построения определяются aτBA и aτBC, по которым можно вычислить угловые ускорения звеньев 2 и 3:
Ускорение точки D определяем по подобию так же, как определяли скорость этой точки:
Рисунок 5 – Планы скоростей и ускорений для заданного положения механизма
Группа Ассура (звенья 4,5) второго класса 3-го вида:
Для определения направления akD5D надо вектор VD5D повернуть на 90° в направлении ω5. Угловые ускорения:
- При силовом расчете необходимо иметь ускорения центров масс (asi), которые на плане ускорений определяются методом подобия.
- Планы скоростей и ускорений для первого положения заданного механизма приведены на рисунке 5.
- Уравнение планов скоростей и ускорений для каждой группы Ассура приведены в таблице 1.
- Таблица 1 – Кинематический анализ групп Ассура II класса методом планов
| Вид группы | Уравнения для построения планов скоростей и для определения угловых скоростей | Уравнения для построения планов ускорений и для определения угловых ускорений |
| 2 | ||
| 3 | ||
| 4 | ||
| 5 |
Пример расчета механизма с поступательно движущимся выходным звеном >
Курсовой проект по ТММ >
Кинематический анализ кулисного механизма
Рассмотрим кулисный механизм, представленный на рис. 8. Пусть кривошип О1А вращается с постоянной угловой скоростью ω1.
Т.к. точка А принадлежит одновременно трём звеньям, то примем следующие обозначения:
- А1 – точка, принадлежащая кривошипу 1;
- А2 – точка, принадлежащая кулисному камню 2;
- А3 – точка, принадлежащая кулисе 3.
Построим план скоростей (рис. 20). Из произвольно выбранного полюса р проводим прямую, перпендикулярную звену О1А. На ней откладываем вектор в направлении угловой скорости ω1, который соответствует скорости в выбранном масштабе (см. формулу (4)).
Рассмотрим кулисную группу Ассура ВПВ, состоящую из звеньев 2 и 3. Составим систему двух векторных уравнений, которая связывает искомую скорость точки А2 с другими скоростями.
Т.к. кулисный камень 2 совершает плоскопараллельное движение, то скорость точки А2 можно представить в виде векторной суммы скорости точки А1 и относительной скорости точки А2 относительно А1:
Т.к. точка А2 в нашем примере совпадает с точкой А1, то скорость = 0. Следовательно, скорости и равны по модулю и направлению.
Кулисный камень 2 совершает сложное движение. Вращательное движение кулисы является переносным, а поступательное движение кулисного камня относительно кулисы – относительным. Скорость точки А2 со стороны кулисы 3 складывается из переносной и относительной скоростей
Таким образом, получим систему векторных уравнений:
В этой системе нам известны скорости и . Переносная скорость складывается из скорости точки O2 (которая равна нулю) и скорости точки А3 (принадлежащей кулисе) относительно точки O2. Скорость неизвестна по величине, а её линия действия перпендикулярна кулисе 3.
Относительная скорость точки А2 (принадлежащей кулисному камню) относительно точки А3 (принадлежащей кулисе) направлена вдоль движения кулисного камня, т.е. вдоль кулисы O2А3. С учётом этих замечаний запишем формулу (17) в виде:
. (18)
Система может быть решена графическим методом, путем построения плана скоростей (рис. 20).
Рис. 20. Построение плана скоростей кулисного механизма
В соответствии с первым уравнением системы (18) точка a1 совпадает с точкой a2. В соответствии со вторым уравнением через полюс р (точка о2 совпадает с полюсом) проводим на плане скоростей прямую, перпендикулярную звену O2А3 (это линия действия вектора ). Т.к.
скорость известна только по линии действия, то из точки a1 проводим прямую параллельную звену O2А3 (линия действия вектора ). Точка пересечения этих двух прямых определит точку a3, которая является концом вектора , изображающего на плане вектор скорости . Направление векторов и находим из второго уравнения системы (18).
Таким образом, построен план скоростей для кулисного механизма.
- Вектор позволяет определить угловую скорость кулисы:
- .
- С такой же угловой скоростью в переносном движении движется и кулисный камень.
Построим план ускорений. Выбираем полюс q. Через точку q проводим прямую, параллельную звену О1А. На ней откладываем вектор направленный к оси вращения О1, соответствующий ускорению в выбранном масштабе (см. формулу (10)). Т.к. угловая скорость ω1 – величина постоянная, то тангенциальное ускорение =0.
Рассмотрим кулисную группу Ассура (ВПВ). Составим систему двух векторных уравнений, которая связывает ускорение точки А2 с другими ускорениями. Т.к. кулисный камень 2 совершает плоскопараллельное движение, то ускорение точки А2 можно представить в виде векторной суммы скорости точки А1 и относительного ускорения точки А2 относительно А1:
.
Т.к. точка А2 в данном случае совпадает с точкой А1, то ускорение = 0. Значит ускорения и равны.
- Ускорение точки А2 при сложном движении кулисного камня складывается из переносного, относительного и кориолисова ускорений:
- .
- Таким образом, получаем систему уравнений:
- . (19)
Переносное ускорение складывается из ускорения точки O2 (равно нулю) и ускорения точки А3 относительно точки O2. А в свою очередь раскладывается на две составляющие: нормальную и тангенциальную. Нормальное ускорение направлено вдоль кулисы А3О2 от точки А3 к точке О2 и определяется по формуле (13):
Тангенциальное ускорение неизвестно по величине, но его линия действия направлена перпендикулярно кулисе О2А3.
Относительное поступательное движение кулисного камня вдоль кулисы иногда называют релятивным движением. А относительное поступательное ускорение – релятивным ускорением. Релятивное ускорение направлено вдоль кулисы O2А3 и неизвестно по величине.
Модуль кориолисова ускорения определяется по формуле:
, (20)
где — угол между векторами и . Значение берётся из плана скоростей. В нашем случае =90˚ и =1.
Направление вектора можно найти по правилу левой руки (указательный палец направлен по вектору , большой – по вектору и тогда средний палец, отклоненный на 90˚, укажет направление кориолисова ускорения ) или по правилу Жуковского (повернув вектор относительной скорости на 90º в сторону переносного вращения). Таким образом вектор направлен перпендикулярно звену О2А3 в сторону точки О1.
Перенесём в левую часть равенства и запишем систему (19) в виде:
. (21)
Эта система может быть решена графическим методом, путем построения плана ускорений (рис. 21).
В соответствии с первым уравнением системы (21) точка a1 совпадает с точкой a2, т.к. .
В соответствии со вторым уравнением через полюс q (точка о2 совпадает с полюсом, так как её ускорение равно нулю) проводим на плане прямую, параллельную звену O2А3 и откладываем на ней вектор . Он направлен от точки А к точке О2.
Вектор соответствует в выбранном масштабе вектору . Через точку n1 проводим прямую, перпендикулярную к звену O2А (это линия действия вектора ). Вектор известен только по линии действия (вдоль кулисы), но неизвестен по величине.
Зато по величине и линии действия известен вектор кориолисова ускорения . Вектору на плане соответствует вектор . Поэтому из конца вектора проводим линию действия вектора (перпендикулярно O2А3). Точка а1(а2) будет являться концом вектора .
Откладываем этот вектор (вычтем его из вектора ) и получим на плане точку n2.
Из точки n2 проводим прямую параллельную звену O2А (линия действия вектора ). Точка пересечения двух прямых проходящих через точки n1 и n2 определит точку a3.
Рис. 21. Построение плана ускорений кулисного механизма
Вектор позволяет определить угловое ускорение кулисы:
.
Таким образом, мы рассмотрели порядок кинематического анализа кулисного механизма. Все остальные действия по определению абсолютных и относительных скоростей и ускорений те же, что и в примере кинематического анализа рычажного механизма с более простыми группами Ассура.
ПОИСК
Пример 4. Построить план ускорений для кулисного механизма, рассмотренного в примере 2 (см. рис. 16, а).
[c.32]
Планы ускорений для кулисных механизмов
[c.180]
Пример 5. Построить план ускорений для кулисного механизма (рис. 236). Угловая скорость кривошипа задана и остается постоянной.
[c.187]
Пример 15. Построить планы скоростей и ускорений для кулисного механизма, изображенного на рис. 2.20,а. Дано размеры звеньев =0,15 м, I =0,35 м.
[c.56]
Решение. Если ролик прикасается к прямолинейному профилю, то планы скоростей и ускорений, построенные непосредственно для действительной схемы кулачкового механизма, остаются те же, что и для кулисного механизма (рис. 5.1, в, г, д). Если ролик касается криволинейного профиля, то план скоростей строят на основании векторного уравнения
[c.92]
План скоростей остается тот же, что и для кулисного механизма (рис. 5.1, в, д). План ускорений (рис. 5.1, а) строят на основании векторного
[c.92]
По планам скоростей и ускорений можно находить скорости и ускорения не только точек, для которых составлены векторные уравнения, но и любых точек механизма, если воспользоваться правилом подобия концы векторов скоростей (или ускорений) трех точек любого звена определяют на плане скоростей (или ускорений) треугольник, подобный треугольнику из этих же точек на звене механизма. Разберем это правило на примере кулисного механизма (рис. 2.34). Пусть требуется определить скорость и ускорение точки Е (планы скоростей и ускорений для этого механизма построены на рис. 2.34, б, в). Чтобы определить скорость точки Е, нужно определить сначала скорость точки О, составив пропорцию для длин звеньев и отрезков плана скоростей [c.73]
Планы скоростей и ускорений строим аналогично выполненным построениям для кулисного механизма (рис. 12).
[c.35]
Построим планы скоростей и ускорений для кулисного заменяющего механизма (фиг. 2. 6, е и ж).
[c.55]
Заменяя высшую пару, добавим фиктивное звено ОВ с двумя низшими парами, при этом получается кулисный механизм (рис. 4.20, в). Построим для него план ускорений, соответствующий векторному уравнению
[c.131]
| Фиг. 16. Построение планов скоростей и ускорений для четырехзвенного кривошипно-кулисного механизма а— схема механизма 6 — план скоростей в — план ускорений | 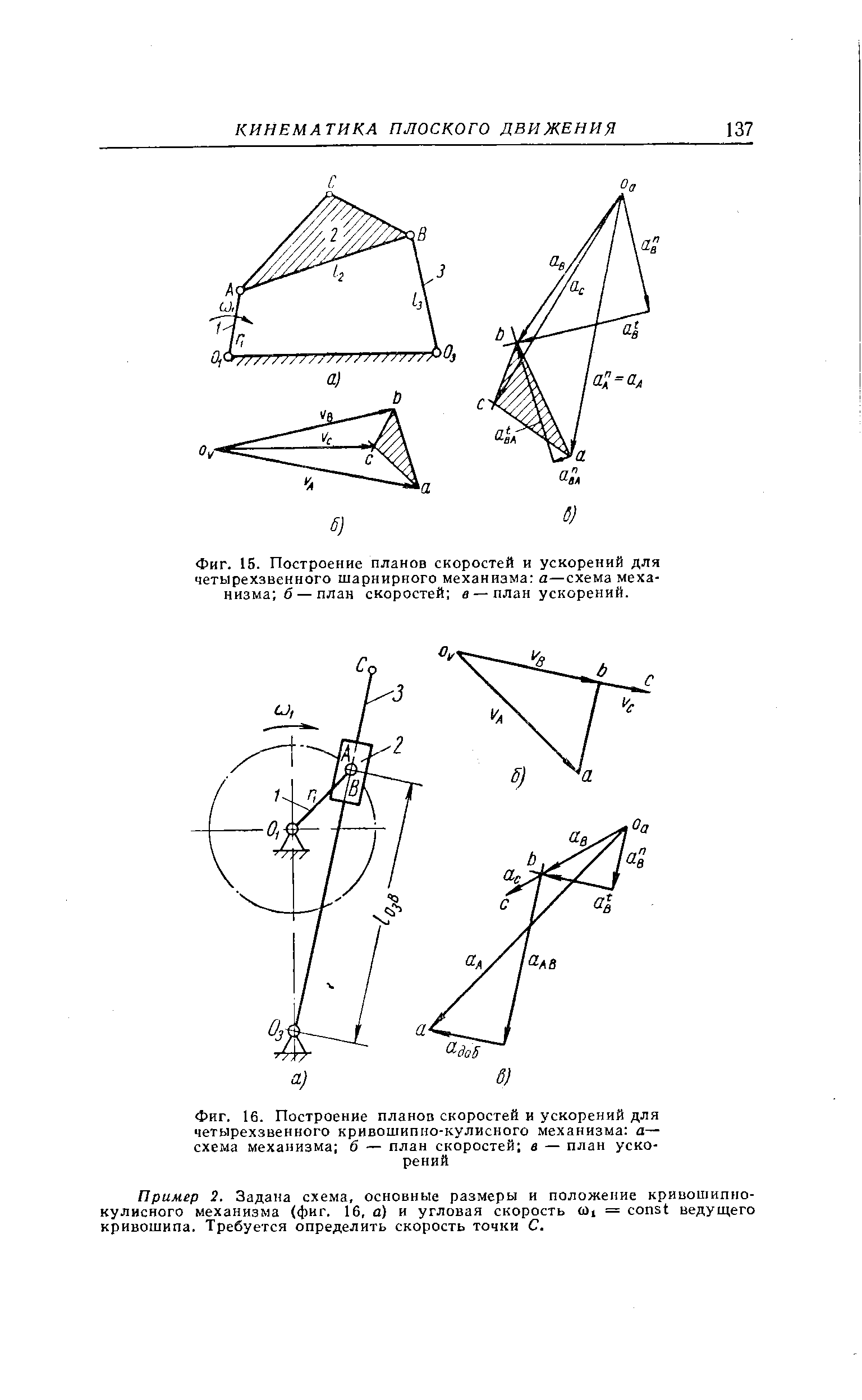 |
Для построения планов скоростей и ускорений кулисного механизма отметим на промежуточном звене (соответствующем шатуну) точку Сг, проектирующуюся в данный момент в неподвижную точку С кулисы (фиг. 501). Абсолютная скорость этой точки совпадает с её относительной скоростью скольжения в кулисе, а потому имеет направление прямой АС с другой стороны,
[c.358]
Кинетостатические расчеты механизмов требуют определения скоростей и ускорений в звеньях механизма и их обычно производят путем построения планов скоростей и ускорений или другими методами.
Для ускорения этих расчетов и определения влияния конструктивных параметров механизма на его кинематические характеристики можно применять формулы и номограмму, по которым определяют скорости и ускорения в кулачковых, многозвенных шарнирных и некоторых кулисных механизмах (рис. 133).
Эти формулы получены на основании решения планов скоростей и ускорений в общем виде [59].
[c.269]
Для механизмов с кориолисовым ускорением построение плана ускорений аналогично рассмотренным выше. На рис. 13, б показан план ускорений кулисного механизма, изображенного на рис. 13, а.
[c.23]
Смотреть главы в:
Механика машин Том 1
-> Планы ускорений для кулисных механизмов
- МЕХАНИЗМ 154 МЕХАНИЗМЫ КУЛИСНЫЕ
- Механизм План ускорений
- Механизм кулисный
- План механизма
- План механизма механизмов
- План сил
- План ускорений
© 2021 Mash-xxl.info Реклама на сайте
2.6. Планы скоростей и ускорений кулисного механизма
Рис.
2.5. Построение планов скоростей и
ускорений кулисного механизма
- Чтобы
построить план
скоростей,
необходимо составить векторное уравнение
скоростей. При этом следует иметь в
виду, что точка А1,
принадлежащая кривошипу 1, и точка А2,
принадлежащая ползуну 2 и совпадающая
на плане механизма с точкой А1,
вращаются вокруг оси О
с одинаковыми линейными и угловыми
скоростями: - VА1
= VА2 и . - Если
задана величина 1,
то величину линейной скорости рассчитывают
по формуле: - VА1
= VА2 =1 LОА,
м/с. - Векторы
скоростей VА1иVА2 направлены перпендикулярно радиусу
ОА1.
Скорость точки А3,
принадлежащей кулисе 3, можно найти по
следующему векторному уравнению
скоростей: - VА3
= VА2
+ VА3А2
, - где
VА3А2
– вектор скорости точки А3
кулисы
относительно точки А2
ползуна; он перпендикулярен прямой А1В
плана механизма.
После
выбора масштаба плана скоростей v
(см. предыдущие примеры механизмов)
строят план скоростей в следующей
последовательности.
Из
полюса Рv
(рис.2.5) перпендикулярно отрезку ОА
плана механизма, проводится вектор
скорости VА1,
совпадающий с вектором скоростиVА2
. На рис. 2.5 это вектор .
Через точкуа1
проводится прямая, параллельная прямой
А1В,
а через полюс Рv
– прямая, перпендикулярная А1В.
На их пересечении получают точку а3
и наносят направление векторов
(“стрелки”), руководствуясь векторным
уравнением скоростей.
Вычисляют
величины скоростей:
где
Рva3
и а1а3
– длины векторов, измеренные на плане
скоростей.
Угловая скорость коромысла 3 вычисляется по формуле
- ,с-1.
- Для
построения плана ускорений составляются
следующие векторные уравнения: - аА3= аА2
+ акорА3А2+ аотнА3А2
, - аА3= аВ
+ аnА3В+ аА3В, - где
аА2
– ускорение ползуна, - акорА3А2
– Кориолисово ускорение точки А3
относительно А2
(возникает тогда, когда есть относительное
движение двух точек с одновременным
вращением их вокруг какой-либо оси; в
данном случае точка А3
движется относительно А2,
и вместе они вращаются вокруг неподвижной
точки В);
направление вектора акорА3А2
определяется так – необходимо условно
повернуть вектор скорости VА3А2
по направлению вращения кулисы 3, это и
будет направление Кориолисова ускорения; - аотнА3А2
— относительное
ускорение точки А3
относительно А2;
его вектор параллелен А3В; - аВ
— ускорение точки В;
аВ
= 0, так как точка В
неподвижна; - аnА3В
— нормальное ускорение точки А3
относительно В;
направление вектора – от А3
к точке В; - аА3В
— тангенциальное ускорение точки А3
относительно
В;
вектор направлен перпендикулярно А3В. - Вычисление
величины Кориолисова и нормальных
ускорений можно произвести по следующим
формулам: - аА2
= аnА1О = 21 LОА,
м/с2; - акорА3А2
= 23
VА3А2,
м/с2; - аnА3В
=23LА3В,
м/с2. - Выбирается
масштаб плана ускорений с использованием
формулы - ,
- где
Раа2
– длина вектора, изображающего ускорение
аА2
на плане ускорений; она выбирается
произвольной длины с таким расчётом,
чтобы, во-первых, будущий план ускорений
разместился на отведённом месте чертежа,
и, во-вторых, чтобы масштаб был удобен
для использования в дальнейших расчётах
(был “круглым числом”). -
Остальные известные
величины ускорений переводятся масштабом
в векторные отрезки соответствующих
длин
Затем
строится план
ускорений
в следующей последовательности.
Из
произвольно выбранного полюса – точки
Ра
– проводится вектор ускорения аnА1О
с длиной Раа2’.
Из точки а2’перпендикулярно
А2В
проводится вектор ускорения акорА3А2
с длиной .
Через точкуk
проводится прямая, перпендикулярная к
этому вектору.
Таким образом, будет
выполнено графическое изображение
первого векторного уравнения ускорений
из двух ранее составленных.
Затем
приступают к построению второго
векторного уравнения.
Из полюса Ра
параллельно прямой А3В
проводится вектор ускорения аnА3В длиной Раn2,
и через точку n2
– перпендикулярная ему прямая до
пересечения с прямой, проведённой ранее
через точку k.
На пересечении этих прямых получается
точка а3’.
Вектор, соединяющий точки Ра
и а3’,
есть полное ускорение аА3
точки А3.
-
Затем вычисляется
угловое ускорение кулисы по формуле -
,
с-2, - где
n2a3`
– длина вектора, изображающего на плане
ускорений тангенциальное ускорение
точки А3
.
Направление
углового ускорения определяется, как
и в предыдущем примере (для
кривошипно-ползунного механизма), то
есть по направлению условного вращения
кулисы 3 вектором ускорения аА3В.
При этом нужно условно перенести этот
вектор в точку А3
плана
механизма и посмотреть, в каком
направлении он будет «вращать» кулису.