Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
29
Добрый день 3д печатники и 'колхозники'.Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
 Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.Немного теории.Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.Немного теории.Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
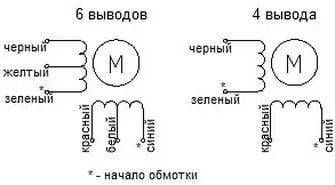
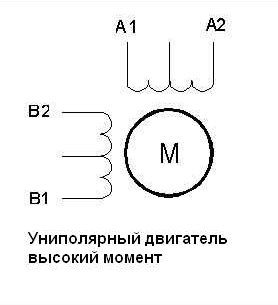
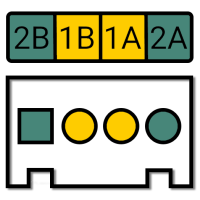
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
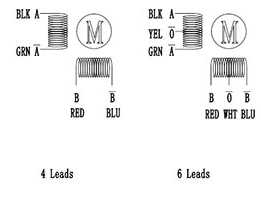
 Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
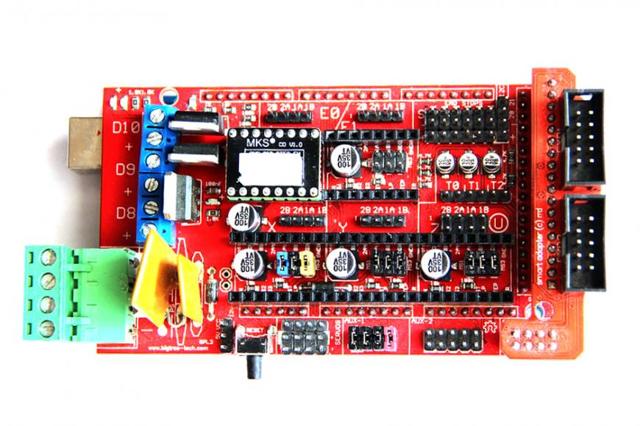
 Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
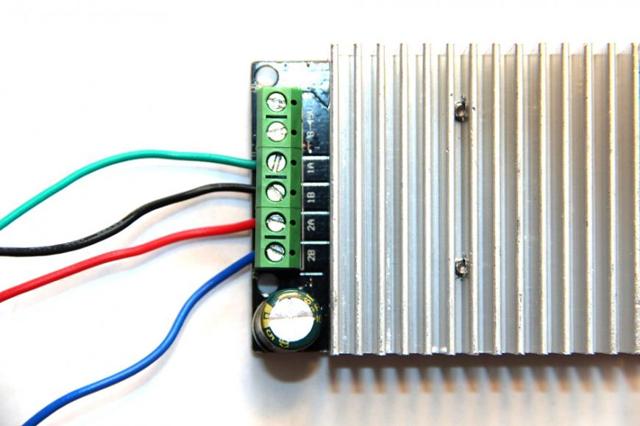
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
 Пошаговая инструкция для чайников :).
Пошаговая инструкция для чайников :).
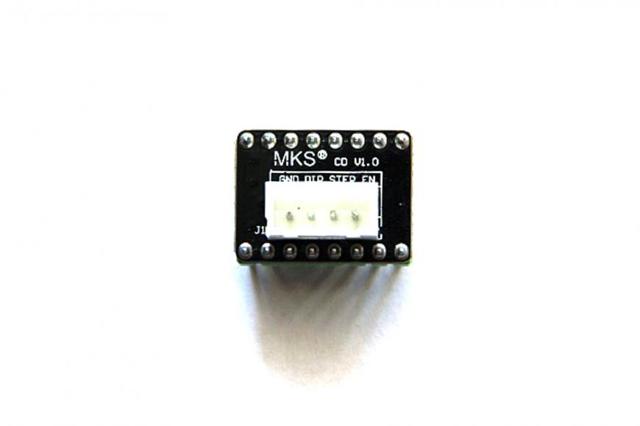
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
 2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
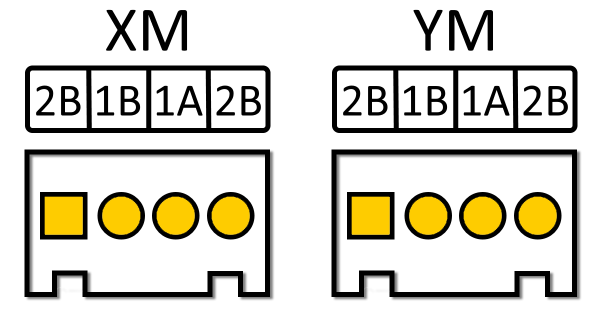
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.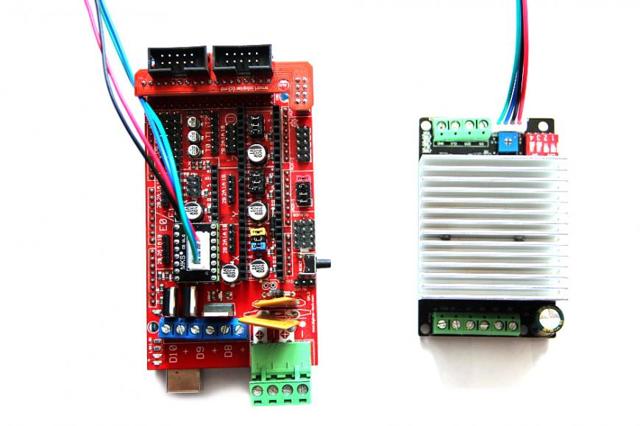 3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.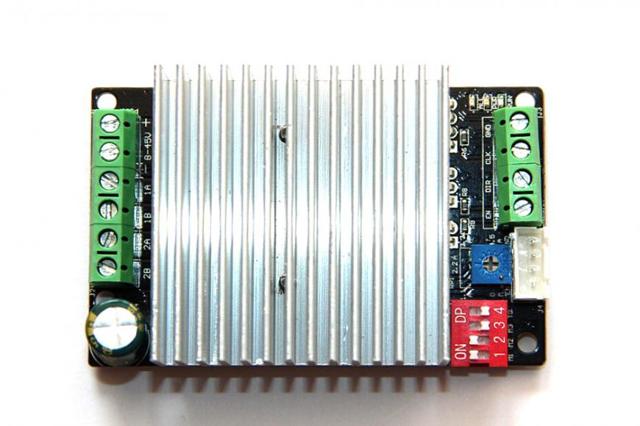
 4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.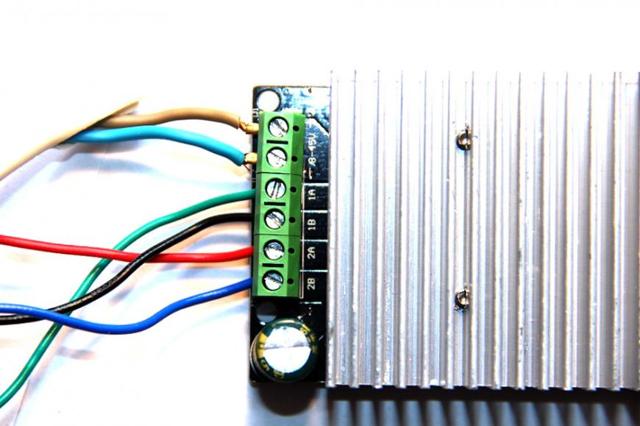 Предыдущие четыре шага на фото ниже. Подключаем LSD дисплей и питание к ramps 1.4. Запускаем двигатель и радуемся результату ;).
Предыдущие четыре шага на фото ниже. Подключаем LSD дисплей и питание к ramps 1.4. Запускаем двигатель и радуемся результату ;).
2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость. Пошаговая инструкция уже для опытных мейкеров 8).1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600. Предыдущие четыре шага на фото ниже. Подключаем LSD дисплей и питание к ramps 1.4.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным.
Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
- Ссылки на компоненты из статьи.
- 1. Шаговый двигатель nema 23 57HM56-2006;
- 2. Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
З.Ы.
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
29
14.05.2022
1982
41
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
Её я сделал ещё три года назад, через год после того, как приобрёл первый принтер. Всегда хотелось д…
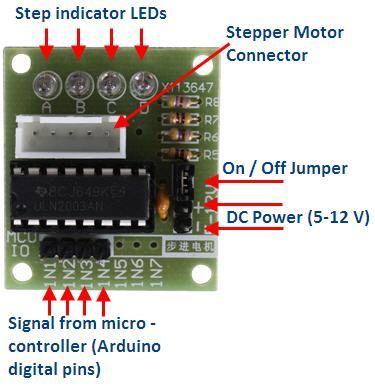
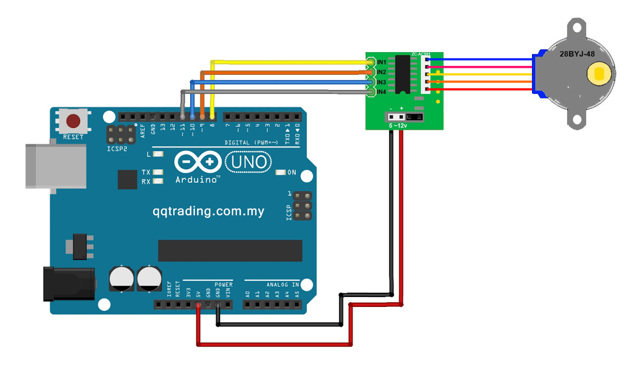
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники.
Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора.
В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
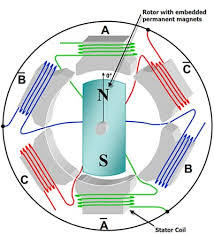 Схема шагового двигателя
Схема шагового двигателя
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию.
Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться.
Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера.
Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема.
С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
 Описание драйвера шаговых двигателей UNL2003
Описание драйвера шаговых двигателей UNL2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
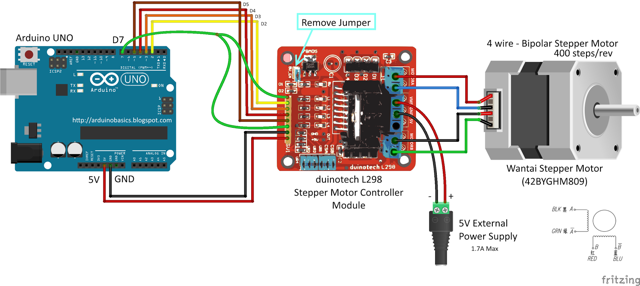 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
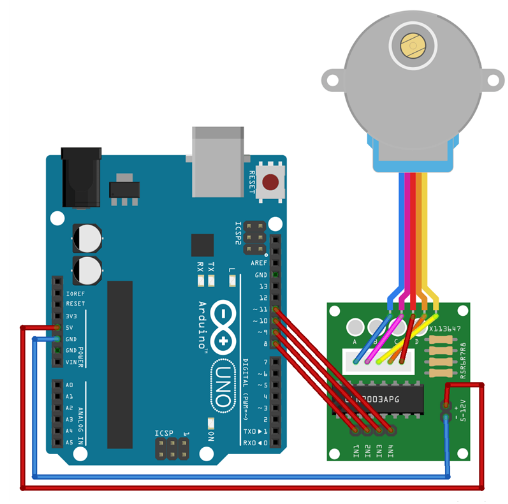 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
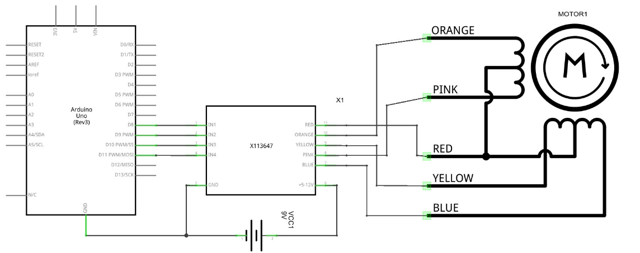 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.
Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.
Характеристики двигателя:
- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
#include
const int stepsPerRevolution = 200;
Stepper myStepper(stepsPerRevolution, 8,9,10,11); //подключение к пинам 8…11 на Ардуино
void setup() {
myStepper.setSpeed(60); //установка скорости вращения ротора
Serial.begin(9600);
}
void loop() {
//Функция ожидает, пока поступит команда, преобразовывает текст и подает сигнал на двигатель для его вращения на указанное число шагов.
Serial.println(«Move right»); //по часовой стрелке
myStepper.step(stepsPerRevolution);
delay(1000);
Serial.println(«Move left»); //против часовой стрелки
myStepper.step(-stepsPerRevolution);
delay(1000);
}
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя.
Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper.
Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Подключение шаговых двигателей
Что делать если при подключении шагового двигателя — он отказывается вращаться? Что делать если подключенный двигатель дрожит, трещит или вращается не в ту сторону. В этой статье мы постараемся решить эти проблемы не прибегая к изменению настроек электроники.
Первое, что нужно проверить — это то насколько хорошо у вас натянут ремень. Дребезг и посторонние звуки могут возникнуть при слабой натяжке ремней. Что в свою очередь приводит к потере тяги и имеет тот же эффект, что и возможные проблемы с проводкой.
Начните с проверки натяжения ремней на вашем 3D принтере. Если на ваш взгляд с натяжкой всё в порядке переходите к следующему пункту.
Второе, что необходимо проверить — это целостность проводки.
Высокие ускорения, длительная печать, не правильная организация проводки могут приводить к повреждению кабеля от платы управления 3D принтера к шаговому двигателю.
Вы установили новый двигатель, поменяли провод или установили новую плату управления и теперь всё не работает или работает не правильно?
Итак, вы установили установили/поменяли новый шаговый двигатель NEMA или поставили новую плату управления 3D принтера. Вероятнее всего сигналы подаваемые от платы управления к двигателю теперь другие, т.е. шаговый двигатель не получает правильный или полный сигнал. Из-за этого шаговый двигатель «сходит с ума» — гремит, шумит или дергается.
Почему же не работает?
Шаговые двигатели NEMA 17 устанавливаемые на практически все 3D принтеры работают на основе обмоток, соединенных попарно, и каждая из них называется фазой. Эти фазы перемещают магниты внутри шагового двигателя.
Когда проводка для этих пар не совпадают или если кабель поврежден, шаговый двигатель не может правильно вращаться, так как северный и южный полюса магнитов не могут получать правильный сигнал и правильно вращаться.
Существует огромное количество производителей как самих двигателей так и электроники, которая управляет этими двигателями.
И никто из производителей не разработал стандарт подключения. Из-за этого проводки шаговых двигателей могут отличаться, а цвета проводов в кабеле которые к ним подключаются ничего не значат.

Кабели для шаговых двигателей
Кроме того, последовательность подключения к плате управления 3D принтера вряд ли будет соответствовать шаговым двигателям. Из-за этого на шаговый двигатель поступает неверный сигнал и он начнет «глючить» — дрожать, греметь или даже двигаться только в одном направлении.
Разъем двигателя в плате BTT SKR mini E3

Разъем двигателя в плате BTT Octopus
Для некоторых плат в свою очередь есть исключения. Например, это касается плат выпускающихся для замены оригинальных 1 в 1.Для самого популярного 3D принтера Ender-3 насколько производителей выпускают платы взамен оригинально устанавливаемой на этот 3D принтер, например, BTT SKR Mini E3 V2 — это специализированная материнская плата для замены платы от Creality. И следовательно проводка в BTT SKR Mini E3 полностью совпадает с проводкой оригинальной платы управления.
Как найти правильное подключение?
Есть несколько быстрых и простых способов определить катушки шагового двигателя.
1. «Прозвонка» с помощью мультиметра
Первое , вы можете использовать мультиметр для проверки целостности цепи. Переведите мультиметр в режим «прозвонки» цепи, который обычно имеет значок диода или зуммера.

Режим прозвонки на мультиметре

Прозвонка шагового двигателя
Затем подсоедините один щуп мультиметра к крайнему левому контакту на двигателе. Затем с помощью другого щупа проверьте один из двух средних контактов. Когда мультиметр начнет отображать значение на дисплее или издаст звуковой сигнал, это значит что вы нашли парное соединение катушку. Повторите тоже самое на правой стороне разъема: подсоедините один щуп на правый контакт двигателя, а вторым щупом проверьте один из двух средних контактов. Вы нашли контакты обмоток двигателя.
2. Поиск светодиодом
Один из самый простых и надежный методов. Возьмите обычный круглый светодиод на 3В. Подключите разъем к двигателю, а в разъем который подключается к плате вставьте светодиод. Теперь вручную прокрутите вал двигателя.
Если светодиод загорелся — вы нашли контакты обмотки.

Поиск обмотки шагового двигателя с помощью светодиода
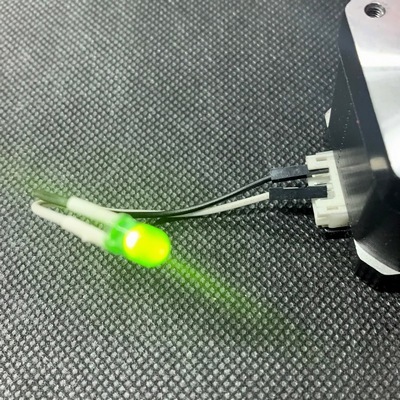
Обмотка шагового двигателя найденная с помощью светодиода
3. Поиск замыканием
Другой метод проверки соединений шагового двигателя заключается в использовании двух проводов с разъемом DuPont на одной стороне и оголенным проводом на другом. Вначале скрутите два оголенных провода вместе.
Затем подключите один разъем Dupont в крайний левый контакт на двигателе а второй разъем Dupont в один из средних контактов на двигателе. Как и в случае со светодиод, поверните вал шагового двигателя.
Если усилие на валу изменилось (увеличился крутящий момент), значит, вы нашли соединение обмотки.

Поиск обмотки шагового двигателя скруткой
Если удачно нашли правильное подключение на двигателях, теперь стоит их сопоставить с разъемами на плате управления.
Подключение шаговый двигателей к плате управления?
Распиновка контактов шагового двигателя на BTT SKR E3
Большинство производителей плат управления для 3D-принтеров указывают распиновку контактов в технических характеристиках самих плат или в руководствах. Проверьте документацию своей платы управления на онлайн ресурсах, например GitHub. У таких производителей как BigtTeeTech, MKS, FLYmaker (Mellow Fly) обязательно есть ресурсы с подробным описанием распиновки. Как только вы найдете распиновку, вы сопоставьте найденные контакты двигателя с контактами 1А и 1B на плате управления. Затем подключите вторую обмотку к контактам 2A и 2B.
Подключили двигатель, а он движется не в ту сторону
Подключенный двигатель работает тихо, так как надо, вот только крутит не в ту сторону. Не стоит отчаиваться. Есть довольно простое решение заставить вал двигателя вращаться в правильном направлении.
Все что вам нужно сделать — это поменять местами провода обмотки.
Если у вас красный + черный провод соответствуют одной обмотке, то вам необходимо поменять их местами чтобы стало черный + красный провод. Ту же операцию можно проделать и с парой средних проводов. Эту операцию необходимо проделать только на одном разъеме провода.
Смена вращения вала шагового двигателя. Было.
Смена вращения вала шагового двигателя. Стало.
Ту же операцию можно проделать и с парой средних проводов. Эту операцию необходимо проделать только на одном разъеме провода. Вначале не помешает сделать фото или записать расположение контактов, чтобы запомнить начальное положение контактов проводов. Затем, с помощью пинцета или небольшой плоской отвертки поднимите защелку на разъеме. Прежде чем отпустить защелку, вытащите провод с из разъема. Постарайтесь не отломить защелку. После того как необходимые провода вытащены, вставьте их обратно, но уже на новые места разъема. Если вы решите проделать эту операцию на разъеме подключаемом к плате управления, то действия будут совпадать.
Замена проводов в шаговом двигателе
Изучаем миниатюрный шаговый двигатель
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.  Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов. Результатами своих поисков и экспериментами я поделюсь в этой статье. Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку.
Знакомство
Сначала немного посмотрим на внешний вид нашего героя: 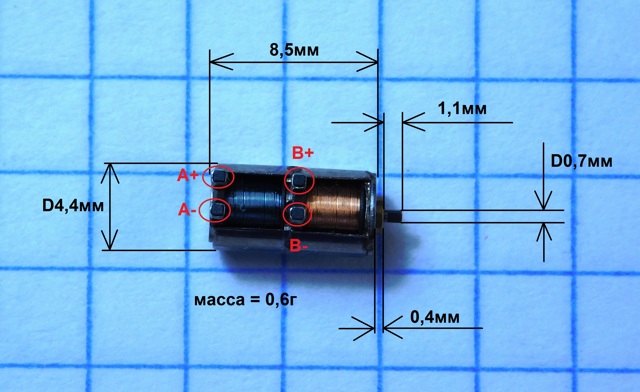 Он действительно очень маленький! Согласно умной книжке Петренко С.Ф. «Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным. Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф. «Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным. Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен: 
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать. Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки. Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга.
Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост.
Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
Итак, схема: 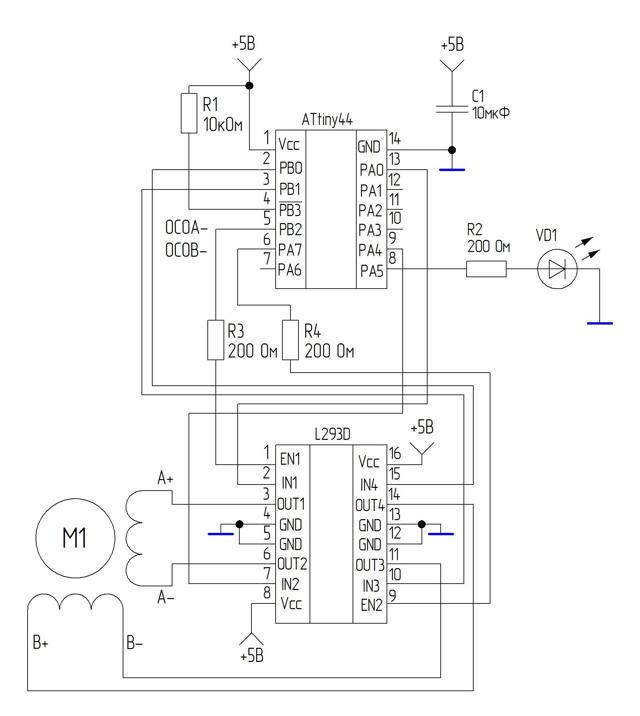 Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал. Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан). Вот как выглядит собранная схема на макетной плате:
Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал. Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан). Вот как выглядит собранная схема на макетной плате: 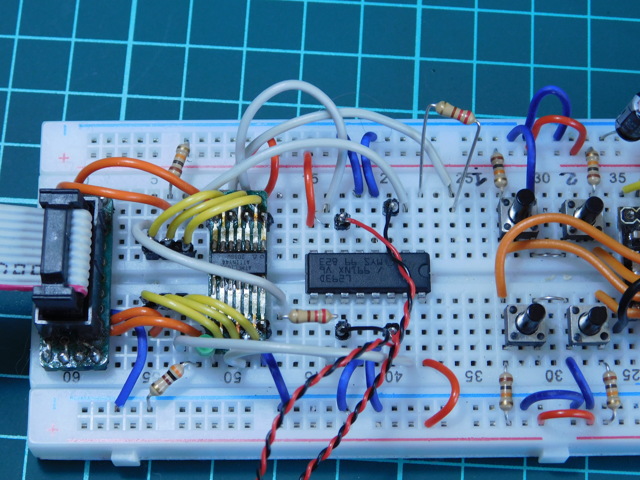 И вот так расположен наш подопытный:
И вот так расположен наш подопытный: 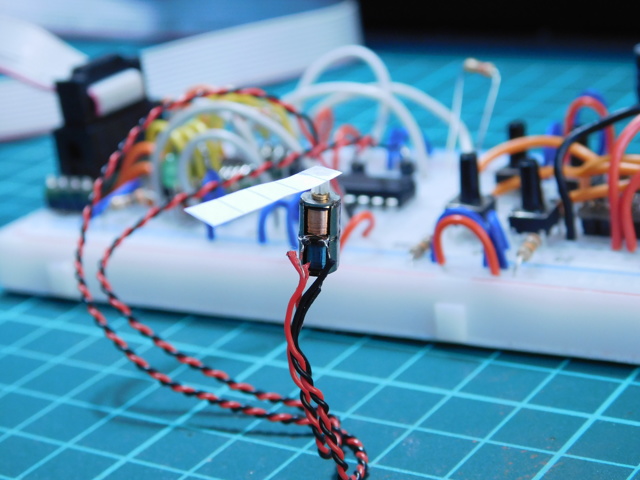 Теперь можно приступать к экспериментам. Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В: I=U/R = 5В/26Ом = 190мА Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться. Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
Теперь можно приступать к экспериментам. Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В: I=U/R = 5В/26Ом = 190мА Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться. Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента. Исходный код программы выглядит следующим образом: Исходный код в среде WinAVR #define F_CPU 8000000UL // указываем частоту в герцах
// фьюзы необходимо выставить L: E2; H:DF; Ex:FF;
// это будет частота 8МГц от внутреннего генератора с выключенным предделителем тактовый частоты (включен по умолчанию и равен 8)
#include // подключаем библиотеку АВР
#include // подключаем библиотеку задержек
#include // подключаем библиотеку прерываний
// управление штатным светодиодом
#define LED_pin PA5
#define LED_ON PORTA |=(1
Подключение шагового двигателя Комментировать
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ.
ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам.
Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов.
Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу.
Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов.
Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
Опыт изучения Arduino. Подключение шагового двигателя. Часть аппаратная. — DRIVE2
Всем привет!
Идея подключить шаговый двигатель (ШД) к ардуино и заставить его работать появилась у меня достаточно спонтанно, когда я случайно купил два нерабочих DVD-RW привода за 100 р. на Юноне. После того как один из приводов был раскурочен, в руках у меня оказался вот такой шаговый двигатель.
Чем же отличается шаговый двигатель от обычного коллекторного или асинхронного? Если не вдаваться в детали, то задача обычного двигателя — вращать вал в определенную сторону с определенной частотой, а задача шагового двигателя — повернуть вал в определенную сторону на определенный угол и удерживать его в таком положении.
Покурив интернеты стало ясно, что просто подав питание на его обмотки, многого от него добиться не получится. Минимум что нужно, чтобы заставить ШД хоть как-то функционировать — это плата управления и источник питания.
Забегая немного вперед отмечу, что источников питания понадобится два: для питания логической части и АЦП (3-5 В) и для питания силовой части (8-35 В). Кстати, плата очень боится пониженного напряжения в цепях питания двигателя. Я сначала подал 6 В. Пока разобрался в чем дело, спалил две платы.
Данные приведены для платы управления на базе распространенного чипа 4988. Вот её схема подключения:
Тут ещё одно замечание. Выводов «в воздухе» быть не должно — все выводы должны быть подключены. Они имеют очень большую чувствительность к помехам.Как видно на схеме, у двигателя две обмотки, чтобы подключить его к плате, надо определить какой вывод к какой обмотке относится. Я напаял 4 разноцветных провода поверх заводского шлейфа.
Делать нужно именно так. Сам шлейф можно обрезать или просто заизолировать, но отпаивать от выводов обмоток нельзя — выводы провалятся внутрь двигателя и он придёт в негодность.Когда провода напаяны, приступаю к определению принадлежности выводов к той или иной обмотке. Проще всего это сделать мультиметром в режиме омметра.
В моем случае синий и зеленый провод это выводы одной обмотки, а оранжевый и белый — другой. Где начало и конец обмотки непринципиально — если двигатель пойдёт не в ту сторону, достаточно поменять местами выводы на любой обмотке.Теперь проверяю двигатель на отсутствие замыканий между обмотками:
Тут тоже всё в порядке.Для питания логической части собрал простейший стабилизатор на микросхеме LM7805 по такой схеме:
На выход добавил конденсатор 40 мкФ на 16 В. Стабилизатор и плату управления разместил на макетной плате.В следующей записи опишу процесс настройки платы и программирование платы ардуино. На следующем фото небольшая превьюшка следующей части)
Продолжение здесь.
Купить комплектующие можно здесь:Arduino Nano с кабелем microUSBМакетная плата 420 точекНабор оконцованных проводов «папа-папа»Разные драйверы двигателей: от дешевых A4988 до «тихих» TMC2208
Всем Мира!До свидания!